CS267 并行计算应用课程笔记
https://sites.google.com/lbl.gov/cs267-spr2020/
lecture 2
单处理器上大部分性能被浪费,主要是因为数据迁移时间太久。
编译器管理内存和寄存器,进行寄存器分配,决定什么时候load/store,什么时候重用。编译器通过图染色的方式决定寄存器重用。
编译器的优化:
- 循环展开、合并、重排
- 删除死代码
- 指令重排来实现指令流水、提高寄存器重用
- 代码强度降低,比如把乘法变成移位
多级cache:
- 片上cache更快,但是更小。
- 更大的cache有延迟,硬件需要更长的时间来检查地址,更多关联度也会延长时间
- 可以利用第四级cache作为被置换出的cache的cache
其他的cache包括:寄存器,TLB等。
处理内存延迟:
- 在小而快的内存中保存数据并重用
- 将一整块数据存入内存并使用
- 程序利用向量化实现一条指令进行多次读或写
- 程序预取或者延迟写
blocking或者tiling是提高cache性能的好办法,使用分治将问题分割到适合cache的大小。
SSE、SSE2:适合16bytes的类型,比如4个float、2个double或者16个byte。可以并行执行加、乘。但是需要对齐,连续。
矩阵是2维数组,在存储上需要根据cache的特性存储,Fortran是列优先,对cache不友好。采用分块的方法进行并行化,存在理论上的最优化分块方法。这种算法就需要在递归时适当地切割。
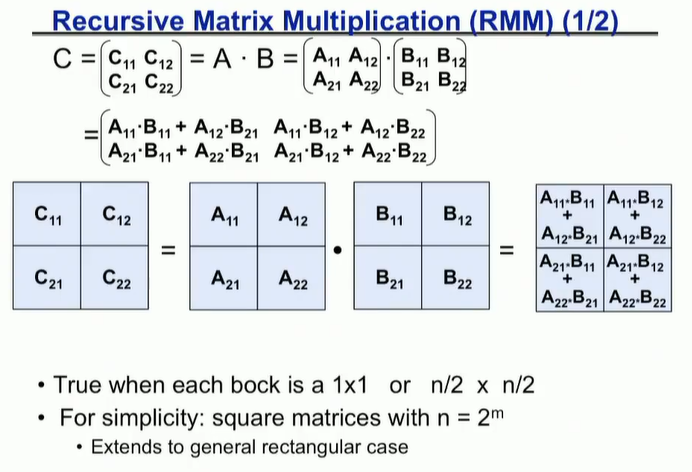
1 | func C = RMM(A, B, n) |
递归的数据分布,可以提高数据局部性,最小化内存延迟,例如画Z字的方式,或者看“cache oblivious algorithm”。好处是可以在任何cache大小下实现较好的性能,不好的是计算index很困难。
删除假的依赖,比如使用局部变量,进行指令重排:
1 | a[i] = b[i] + c; |
可能会有假的数据依赖,借助局部变量改成
1 | float f1 = b[i]; |
或者对频繁使用的变量进行预先加载,使寄存器中保持有变量。
循环展开促进指令级并行,提高流水线性能,或者向量化。
再设计数据结构时注意cache局部性,比如多使用struct。
strassen’s矩阵乘法,将8次乘+4次加优化到7次乘+18次加,能做到O(n^2.81):
1 | Let M = | m11 m12| = |a11 a12| |b11 b12| |
其他一些矩阵矩阵乘算法:
- 世界纪录是O(n^2.37548)
- 2.37548 reduced to 2.37293
- Virginia Vassilevska Williams, UC Berkeley & Stanford, 2011
- 2.37293 reduced to 2.37286
- Francois Le Gall, 2014
- 大概能做到O(n^2+e)
- Cohn, Umans, Kleinberg, 2003
CNN在计算什么?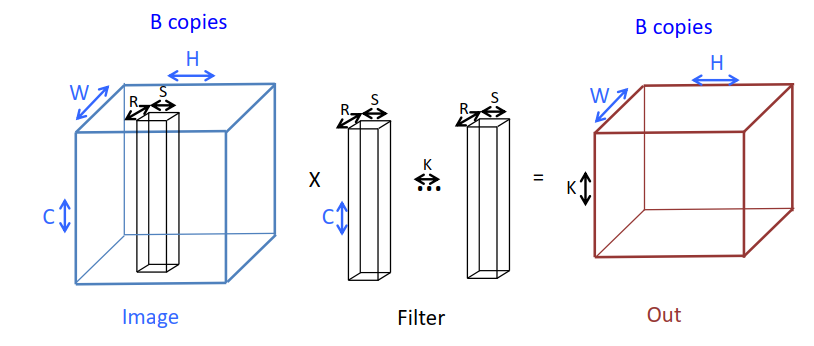
1 | for k=1:K, for h=1:H, for w=1:W, for r=1:R, |
lecture 3
几种并行的模型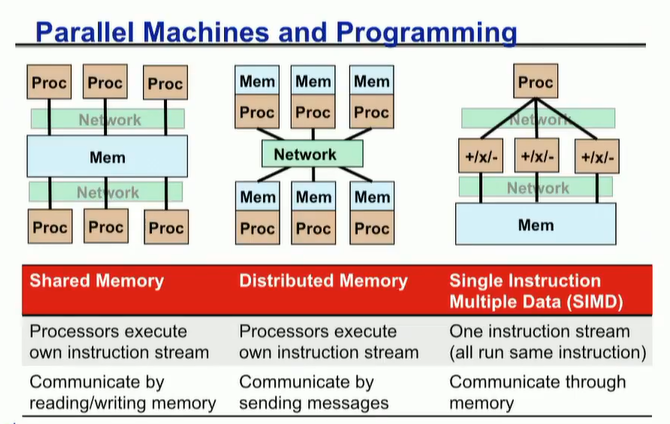
如何并行化下边的程序,每一个y依赖于前一个:
1 | y[0] = 0; |
这个图应该是以树形计算前缀和的示意图,最上边是原始数组,中间是逐次计算两两和,最下边是最终结果。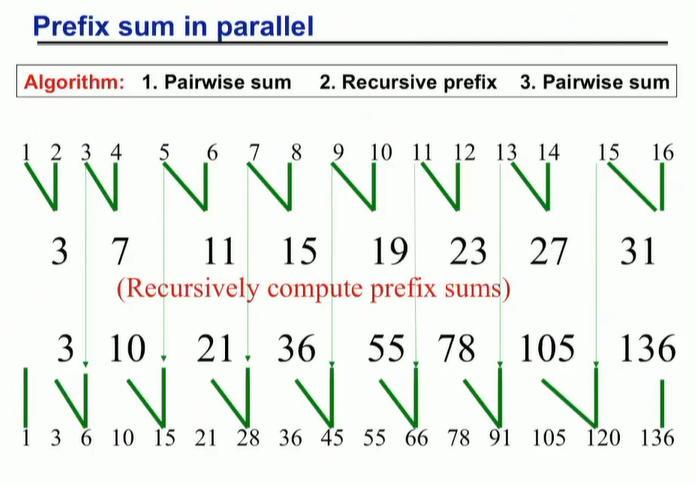
lecture 4
SIMD:数据并行的语言非常成功,不规则的数据(稀疏矩阵乘向量)比较适配,但是不规则的计算(分治、递归等)不太行。
共享内存多处理器时代,出现了一些共享内存模型,POSIX Threads、OpenMP等
集群时代,出现了MPI。
每个线程有一些私有变量,如本地栈。也有一些共享的变量,如通过malloc的变量,静态变量等。线程通过读写共享变量实现数据通信。
pthreads是POSIX线程接口,用来创建和同步线程,但是没有对通信的显示支持,因为共享内存是隐式的。pthread_join意思是等待,直到线程结束。创建线程的开销是不能被忽略的,因为涉及了系统调用。
1 | int pthread_create(pthread_t*, const pthread_attr_t*, void *(*)(void*), void*); |
数据竞争即为各个线程竞争同一个变量。
mutexes是互斥锁。当线程需要访问一个变量时,需要加锁。信号量允许k个线程同时访问资源,适用于有限个资源的时候。
1 | pthread_mutex_t amutex = PTHREAD_MUTEX_INITIALIZER; |
POSIX线程基于OS,可以被多种语言使用,但是创建线程的开销大,数据竞争的bug也有很多。
openmp有C/C++和Fortran的接口:
- 预处理指令
- 库函数
- 环境变量
它是一个方便的线程级内存共享编程工具,允许把程序分成穿兴趣和并行区,而不是纯线程。也不需要进行栈的管理,提供了同步命令。
最经常用的OpenMP命令如下: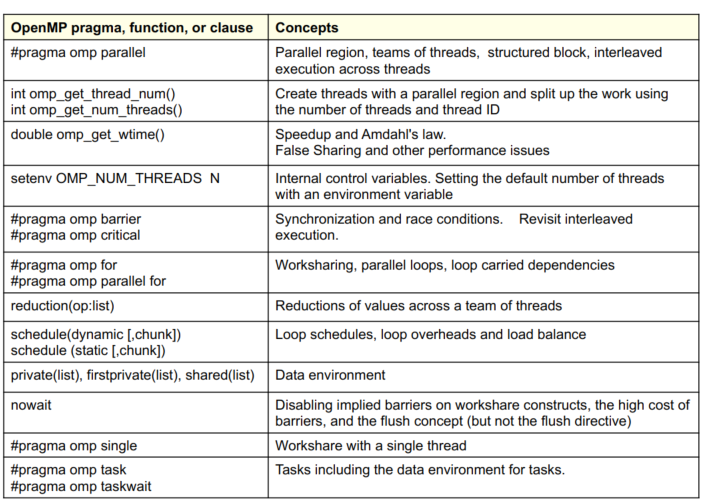
OpenMP的基本语法:
1 |
|
OpenMP使用的是fork-join模型,主线程派生一系列线程,等待子线程结束后继续执行,遇到需要多线程的代码块时再fork线程。
1 | double A[1000]; |
各个线程共享A数组,但是每个线程都有一个id变量。
可以通过omp_get_thread_num请求创建多少个线程,但不是你要创建多少线程就是多少线程,一旦请求了一个数量的线程数并创建,系统就不会减少这个数量。
1 | static long num_steps = 100000; |
每个处理器有自己的多级cache,多处理器系统中存在cache一致性问题。内存中的一个数字被放到处理器P1的cache中,又被放到P2的cache中,如果P1修改了数字,P2是不知道的,这样就不一致了。写回策略中,数据被写回是取决于什么时候,被哪个处理器写回的。
使用cache一致性协议来写回,但是在多处理器中并不具有可扩展性。
内存总线是一个广播的机制,cache中保存着它们存在哪个地址,cache控制器监控着总线上的所有cache事务,一个事务是一个相关的事务,如果涉及的cache行在本地处理器的cache中。
如果独立的数据元素碰巧位于同一个缓存行上,每次更新都会导致缓存行在线程之间“来回晃动”……这称为“假共享”。
如果将标量提升到数组以支持创建 SPMD 程序,则数组元素在内存中是连续的,因此共享缓存行导致可扩展性较差。解决方案:填充数组,以便您使用的元素位于不同的缓存行上。
同步用于施加顺序约束并保护对共享数据的访问,包括:
- 互斥区
- barrier
被互斥区包裹起来的部分每次只能有一个线程访问,barrier是直到所有线程都到这个barrier了才一起往下执行。
for循环可以被并行化,其中的i是默认私有的,各个线程等到for循环完成后再一起执行:
1 |
|
schedule命令决定了任务怎么映射到每个进程。有static和dynamic两种,static是静态的,在编译时决定;dynamic会动态调度或者从任务队列中分配,在执行过程中决定。
reduction即规约,进行最大、最小、平均等操作。每一个列表中的变量会被复制到每个线程,并初始化,对局部变量进行操作,局部变量再规约到主线程。
1 |
因为barrier很耗时,而for循环结束之前都会有一个默认的barrier,所以可以在for循环之前使用nowait实现不barrier。
可以针对不同变量选择不同的共享策略,比如:shared、private(为变量创建一个本地拷贝,且不初始化,且原来的全局变量不变)、firstprivate。
1 |
|
default(none)强制您为出现在范围内的变量定义存储属性……如果失败,编译器会报错。可以将default子句放在parallel 和parallel + workshare 结构上。j和y没有规定存储策略,编译器会报错。
1 |
|
tasks是一系列独立的work,由执行代码和计算的数据组成,线程被分配执行每个task的工作。
下例中组成一个task的二叉树,直到一个task之前的所有task被完成,这个task才能被完成。
1 | int fib(int n) { |
single表示这个代码块只能被一个线程执行,这个代码块之后有一个默认的barrier。
flush操作
- 定义一个序列点,在该点线程强制执行一致的内存视图。
- 对于其他线程可见并与刷新操作(flush-set)相关联的变量
- 编译器不能在刷新周围进行刷新集的加载/存储:
- 该线程之前对flush-set 的所有读/写都已完成
- 没有发生此线程对刷新集的后续读/写
- 刷新集中的变量从临时存储移动到共享内存。
- 刷新后刷新集中变量的读取从共享内存加载
lecture 5
使用性能模型或工具,以预测架构的性能。需要假定运行时间与需要的运算、数据移动的次数相关,其中,数据移动的次数更相关,因为需要理解cache的行为。
串行机器在访问内存时会遇到延迟,而并行机器在同步、点对点通信、规约时会遇到延迟,所以可以使用算法的依赖链进行分类。
数据移动复杂性
- 假设运行时间与访问(或移动)的数据量相关
- 易于计算访问的数据量……计数数组访问
- 移动的数据更加复杂,因为它需要了解缓存行为……
计算深度
- 多核处理器甚至单核都依赖于并行性
- 一些算法有一些固有的串行路径
- 深度是最长的依赖链
- 考虑在无限数量的处理器上运行而没有OMP、通信或循环开销
在分布式内存中,通过在处理器之间发送消息来进行通信。消息传递时间可能受到几个组件的限制……
- 开销(发送/接收消息的 CPU 时间)
- 延迟(时间消息在网络中;可以隐藏)
- 消息吞吐量(发送小消息的速率……消息/秒)
- 带宽(可以发送大消息的速率 GBytes/s)
我们算法的分布式内存版本可以根据 N 和 P(#processors)由这些部分不同地描述
可以用多种方法建模性能,前三个是roofline模型,中间两个是LogCAche模型,后三个是LogGPa模型:
- 浮点数操作:Flop/s
- cache数据操作:GB/s
- DRAM数据操作:GB/s
- 总线数据移动:PCIe带宽
- Depth:OMP嵌套深度
- MPI数据大小:带宽
- MPI发送/等待比例:网络延迟
很多模型都追踪延迟来预测性能,延迟隐藏衍生出多种方法,例如乱序执行(硬件发现并行性),硬件预取(硬件自动家在数据),大规模线程并行(独立的线程提高并行)。
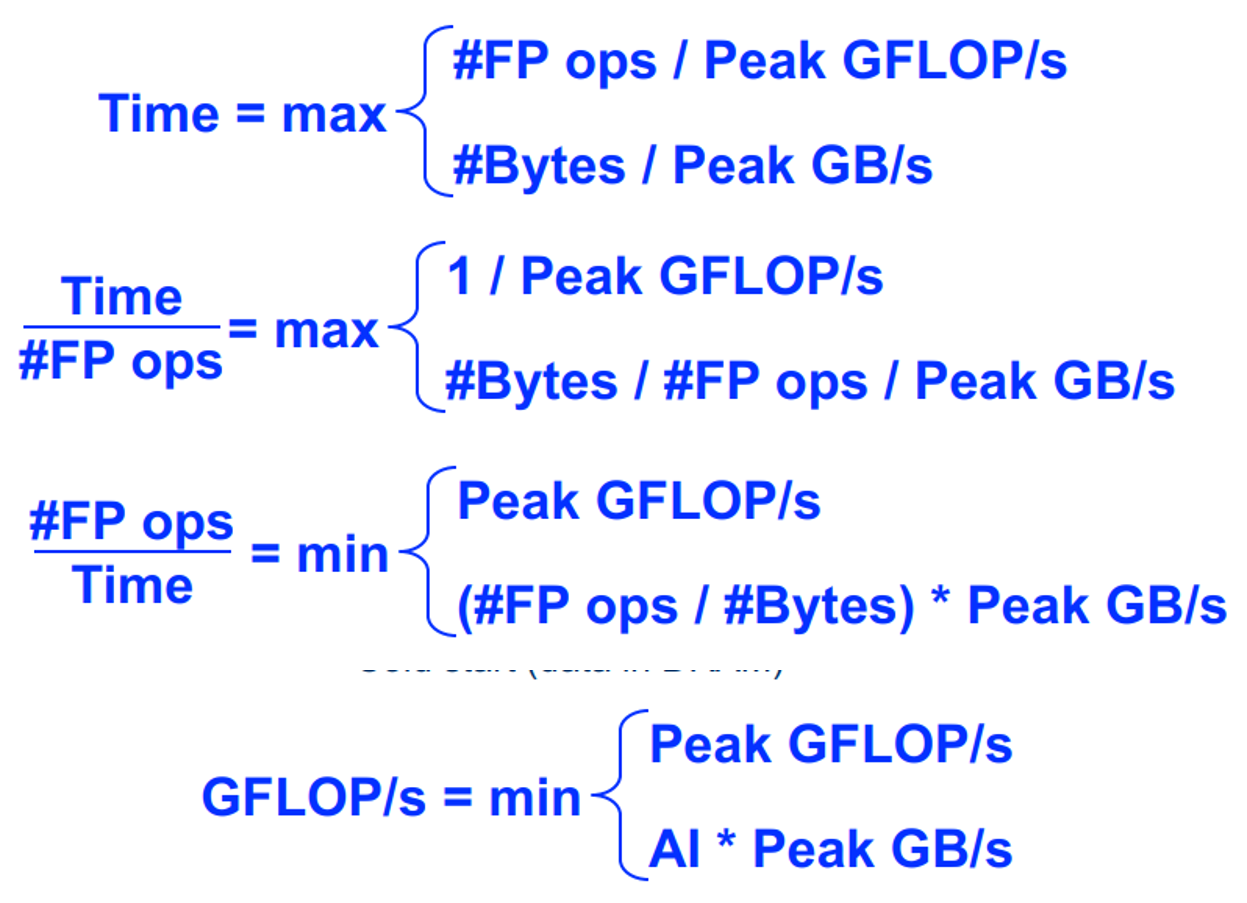
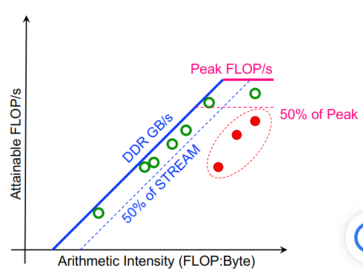
roofline模型是基于吞吐的模型,追踪比例而不是时间。
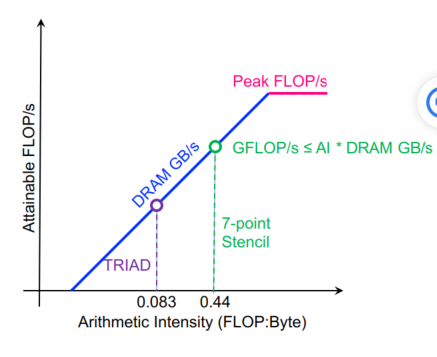
DRAM的roofline:人们可以希望永远达到峰值性能(FLOP/s),然而,有限的局部性(重用)和带宽限制了性能。我们假定:
- 理想化的处理器/缓存
- 冷启动(DRAM 中的数据)
Arithmetic Intensity (AI) = Flops / Bytes (as presented to DRAM )
Roofline 中最重要的概念是算术强度
- 数据局部性的度量(数据重用)
- 执行的总Flops与移动的总字节数的比率
- 对于 DRAM Roofline…
- 进出 DRAM 的总字节数,包括所有缓存和预取器效果
- 可能与总加载/存储(请求的字节数)有很大不同
- 等于持续 GFLOP/s 与持续 GB/s 的比率
使用算术强度作为 x 轴绘制roofline边界,对数刻度使画图变得容易,根据摩尔定律推断性能等……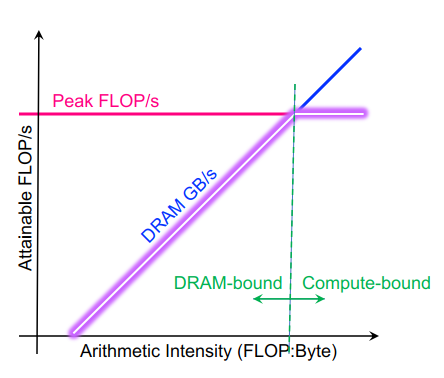
一般的机器现在都是5-10flops每个字节,40-80flops每个double。对于以下计算:
1 |
|
每次迭代2个flops,传送24个bytes(读x[i],y[i],写z[i])AI = 0.083。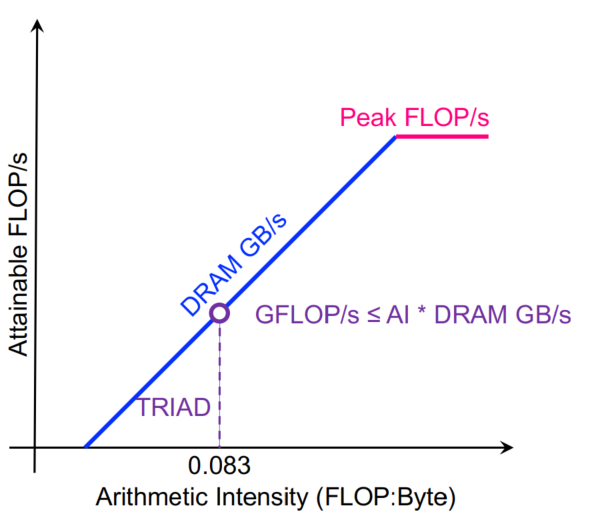
每次循环7flops,每个点8次内存访问,除了一次读和1次写,cache都能搞定,AI=7/16=0.44
1 |
|
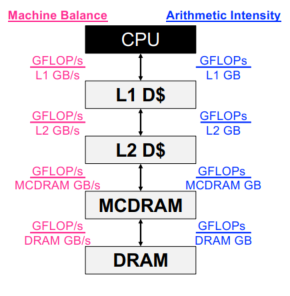
分层roofline
- 处理器具有多级内存/缓存
- 寄存器
- L1、L2、L3 缓存
- MCDRAM/HBM(KNL/GPU 设备内存)
- DDR(主存储器)
- NVRAM(非易失性存储器)
- 应用程序在每个级别都有局部性
- 独特的数据移动意味着独特的AI
- 此外,每个级别都有独特的峰值和持续带宽
片内并行性:我们假设一个可以获得高flops的运算,也有高局部性。实际上,我们必须……
向量化循环(每条指令 16 个触发器)
使用特殊说明(例如 FMA)
确保 FP 指令在指令组合中占主导地位
使用所有内核和插槽
大多数处理器利用某种形式的 SIMD 或向量。
- KNL 使用 512b 向量 (8x64b)
- GPU 使用 32 线程扭曲 (32x64b)
实际上,应用程序是标量和向量指令的混合体。
- 性能是 SIMD 和无 SIMD 之间的加权平均值
- 有一个基于这个加权平均值的隐含上限
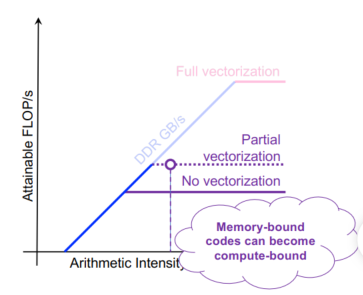
我们可以仅使用强制缓存未命中来绑定 AI
- 但是,写分配缓存会降低 AI
- 缓存容量未命中可能会造成巨大损失
- 计算墙转换成内存墙
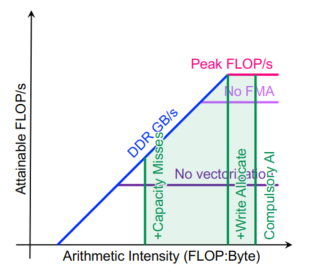
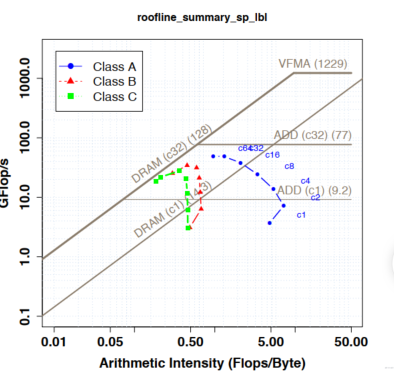
由于计算与内存交互影响,flops可能不能作为优化的依据,所以就可以把AI排序,将这些部分的性能与机器扩展性/容量进行比较。roofline附近的内核正在充分利用计算资源
- 内核可能具有低性能 (GFLOP/s),但可以很好地利用机器
- 内核可以具有高性能 (GFLOP/s),但不能很好地利用机器
AI(数据移动)因线程并发性和问题大小而异
- 大问题(绿色和红色)每个线程移动更多数据,最终耗尽缓存容量
- 由此导致的 AI 下降意味着它们迅速达到带宽上限并降级。
- 较小的问题会减少 AI,但不要达到带宽上限
现在CPU采用多种方法来增加浮点效率。比如使用fused multiply add来使乘法和加法在同一个流水线中,使用向量指令。
三种方法来提高性能:增加片上性能(比如让编译器进行向量化),增加内存带宽(NUMA),最小化数据移动。
如何构建roofline?要创建 Roofline 模型,我们必须执行基准测试……
- 持续的flops
- 双精度/单精度/半精度
- 有和没有 FMA(例如编译器标志)
- 有和没有 SIMD(例如编译器标志)
- 持续带宽
- 在每个级别的内存/缓存之间进行测量
- 迭代各种大小的工作集并识别平台
- 识别带宽不对称(读:写比率)
- 基准测试必须运行足够长的时间以观察
衡量应用程序 AI 和性能
- 要使用 Roofline 来描述执行的特征,我们需要……
- 时间
- flops(=> flops/时间)
- 每级内存之间的数据移动(=> FLOPs / GB’s)
- 我们可以查看完整的应用程序……
- 粗粒度,平均 30 分钟
- 遗漏了很多细节和瓶颈
- 或者我们可以查看单个循环嵌套……
- 需要逐个循环地进行自动检测
- 此外,我们可能应该逐核区分数据移动或flops
我们如何计算 FLOP?
- 手动计数
- 遍历每个循环嵌套并计算 FP 操作的数量
- 最适合确定性循环边界
- 或按迭代次数参数化(运行时记录)
- 不可扩展
- 性能计数器
- 之前/之后读取计数器
- 更准确
- 低开销 (<%) == 可以运行完整的 MPI 应用程序
- 可以检测负载不平衡
- 需要特权访问
- 需要手动检测(+开销)或完整的应用程序表征
- 差的counter得到的数据=垃圾
- 可能无法区分 FMADD 和 FADD
- 没有深入了解特殊流水线
- 二进制指令测试器
- 在运行时自动检查装配
- 最准确
- 可以按类别/类型统计指令
- 可以检测负载不平衡
- 可以包括来自非 FP 指令的效果
- 自动应用于多个循环嵌套
- 大于10 倍的开销
我们如何衡量数据移动?
- 手动计数
- 遍历每个循环嵌套并估计将移动多少字节
- 使用缓存的健壮模型
- 最适合从 DRAM 流的简单循环
- 对于复杂的缓存不适用
- 不可扩展
- 性能计数器
- 之前/之后读取计数器
- 适用于全层级(L2、DRAM)
- 更准确
- 低开销 (<%) == 可以运行完整的 MPI 应用程序
- 可以检测负载不平衡
- 需要特权访问
- 需要手动检测(+开销)或完整的应用程序表征
- 缓存模拟
- 构建一个由内存地址驱动的全缓存模拟器
- 适用于全层级和多核
- 可以检测负载不平衡
- 自动应用于多个循环嵌套
- 忽略了预取器
- 大于 10 倍的开销
工具:Intel Advisor
lecture 6
并行化和数据局部性都对性能很重要,因为数据迁移是很费劲的。很多对象是独立于其他对象来操作的,更多的是依赖于与之相邻的对象,其依赖关系很简单。
同时讲了一些计算域剖分的问题,减少通信的同时实现局部性。
并行图计算:如果两个进程的图相连,则需要交互,他的数据结构与一般的图算法不一样,将图剖分到各个节点上,平均分布实现均衡,同时最小化节点之间边的关系减少通信。
粒子系统模拟需要实现每个粒子受到的作用和对其他粒子的作用,这就需要通信,通常是对整个区域进行剖分,区域之间进行halo交换。第一个挑战就是在处理区域边界上的粒子碰撞,第二个挑战是如果粒子成簇状分布的话会不均衡,为了减少不均衡,对空间也采取不均衡划分,采用k-d树的形式对粒子进行划分。
远域强迫指的是每个进程都跟其他进程的粒子进行作用,采用循环的方式进行数据通信,最中每个进程得到所有其他进程的数据。如果使用树形剖分的话,将每一簇粒子看成一个整体,降低复杂度。
假定ODE是x(t) = f(x) = A * x(t),A是一个稀疏矩阵,显式方法可以转化成一个近似的稀疏矩阵乘,隐式方法可以转化成一个线性方程。另外还有直接方法,做LU分解,迭代方法(Jacobi、Successive over-relaxation、Conjugate Gradient)等。
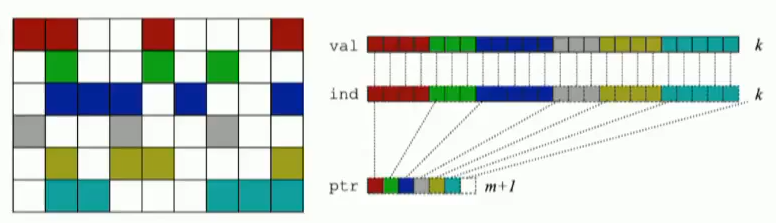
稀疏矩阵向量乘:稀疏矩阵可以只保存非0元,CSR方法是最简单的方法,对稀疏矩阵m*n,一个指针数组有m个元素,每个元素代表着第i行所有元素的起始位置。val数组和ind数组保存着实际的元素。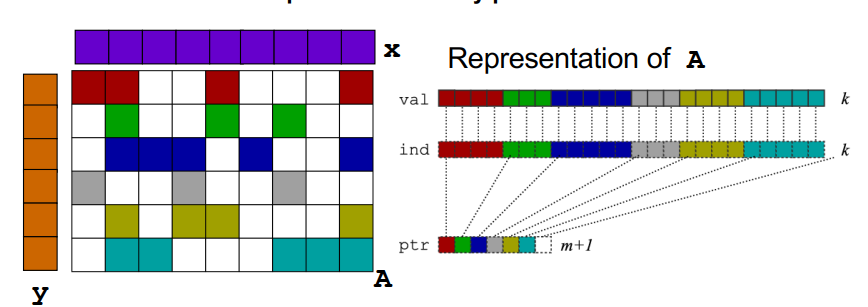
1 | for each row i |
如果要并行化,需要知道,哪个进程拥有y[i]、x[i]、A[i,j],和哪个进程应该计算最终的y[i] = sum(from 1 to n) A[i,j] * x[j]。
首先将下标1到n进行剖分,对于进程k,它存储了每一个下标i的y[i]、x[i]、A[i,...],同时计算了y[i] = (row i of A) * x,这里需要通信了。
能否将矩阵重排,使所有非零元素都在对角块上?这样所有运算都可以在本地完成。重排的目标
- 平衡负载(如何测量负载?)。
- 大约相等数量的非零值(不一定是行)
- 平衡存储(每个处理器存储多少?)。
- 大约相等数量的非零值
- 尽量减少通信
- 最小化对角块外的非零值
- 相关优化标准是移动对角线附近的非零值
- 改进寄存器和缓存重用
- 在小的垂直块中将非零值分组以便源 (x) 元素加载到缓存或寄存器中可以重用(时间局部性)
- 在小的水平块中分组非零值,以便靠近源 (x)中的元素可以命中cache(空间局部性)
- 其他算法出于其他原因对行/列重新排序
- 在高斯消元后减少矩阵中的非零值
- 提高数值稳定性
图的并行化和矩阵并行化类似。
自适应网格加密:并行化基于patches。
非结构网格的挑战:
- 如何首先生成它们
- 从对象的几何描述开始
- 三角化
- 3D 更难!
- 如何划分它们
- ParMetis,一个并行图分区器
- 如何设计迭代求解器
- PETSc,一种用于科学计算的便携式可扩展工具包
- Prometheus,一个用于有限元问题的多重网格求解器
- 如何设计直接求解器
- SuperLU,并行稀疏高斯消除
lecture 7
CPU中有取指、解码、ALU、运行上下文、乱序控制逻辑、指令预测、数据预取、cache等模块。第一个优化的方法是取消让单指令流跑得更快的部分,只剩下取指、解码、ALU运行上下文模块,多个线程共享指令流。第二个方法,让多个ALU共享取指令部分,共享部分运行上下文。
如果遇到了分支,那么不是所有的ALU都运行相同的分支,会遇到暂停,通过切换来隐藏延迟。
- 使用许多精简的内核并行运行;
- 核心打包大量 ALU;
- 通过交错执行来避免延迟停滞;
- 当一组停滞时,切换到工作准备就绪的另一组
SIMD单指令流多数据流架构充分使用了数据并行,并行暴露于用户和编译器。SIMD的发展如下:MMS(8*8 bit int) —> SSE(4*32 bit FP) —> SSE2(2*64 bit FP) —> SSE3(hroizontal ops) —> SSSE3 —> SSE4.1 —> SSE4.2 —> AVX(8*32 bit FP) —> AVX+FMA(3 operand) —> AVX2(256 bit int ops) —> AVX-512(512 bit)
GPU使用的是单指令流多线程(SIMT),每个线程有自己的寄存器组,且可能执行不同的流程,单指令流可以在多个地址上执行。
- 低占用率会大大降低性能。
- 控制流分散会大大降低性能。
- 同步选项非常有限
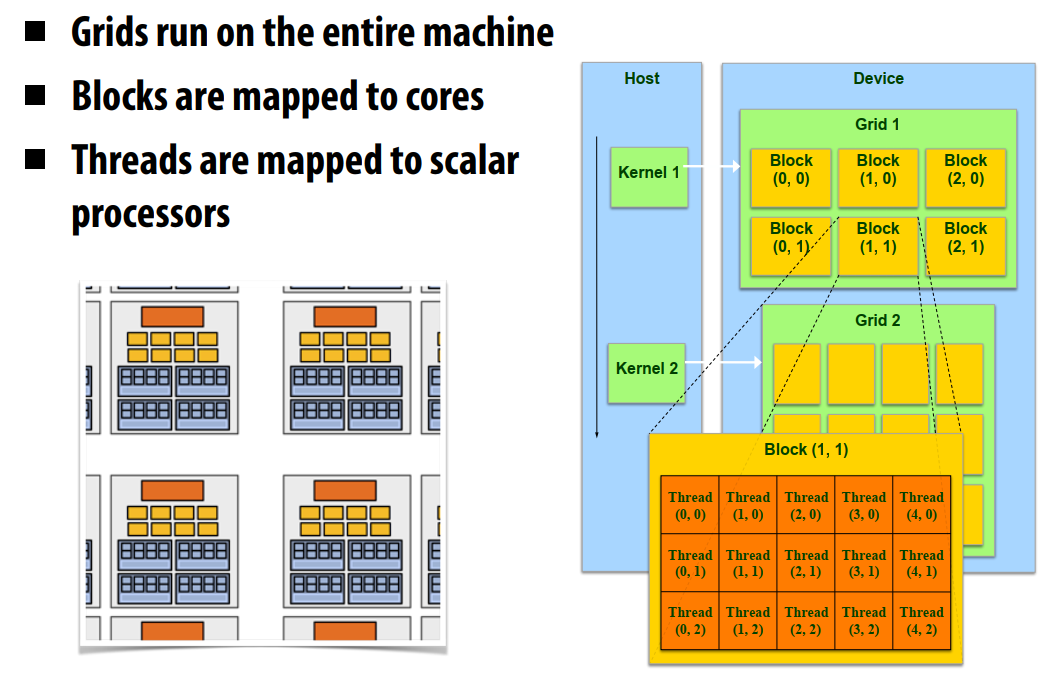
CUDA是用于SIMT的模型,具有可扩展性。
block有id,每个块内共享内存,可以是1、2、3维;block内有thread,thread有自己的寄存器和私有内存,可以是1、2、3维。2/3维只是组织方式,通过一维手段同样可以达到2/3维的效果。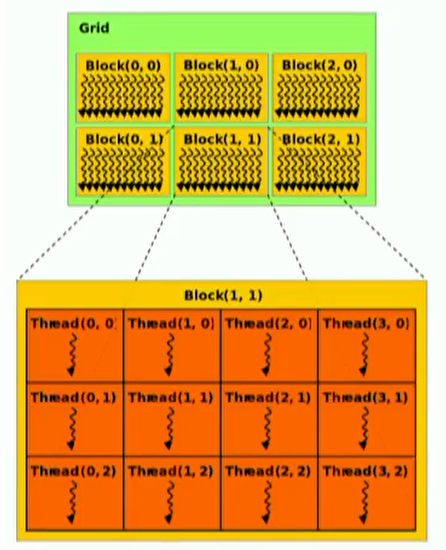
CUDA的线程是独立运行的,有他自己的程序计数器(PC)、变量寄存器、处理器状态位等,不会内定如何调度。线程可能会被映射到GPU上,成为物理线程;也可能在多核CPU下,1 block=1个物理线程,成为虚拟线程。
CUDA支持:
- 线程并行
- 每线程都是独立运行的
- 数据并行
- 任务并行
- 不同block是独立的
- 独立的核运行不同的流
线程被分到不同的block中,同一个block中的线程可以合作,不同block的线程不能合作。不同的block之间可以协调但是不能同步,容易死锁;可以进行多种交互。
- 在GPU上为数据分配空间
- 创建CPU上的数据
- 数据复制到GPU上
- 调用kernel程序来运行GPU
- 结果数据从GPU拷贝到CPU
- 释放GPU的空间
- 释放CPU的空间
三种不同的函数:
__device__ float DFunc()运行在Device上,只能从Device上调用__global__ void kernel()运行在Device上,只能从host上调用,只能返回void__host__ float HFunc()运行在host上,只能从host上调用
简单的调用:
1 | // CUDA Kernel function to add the elements |
数据管理:
1 |
|
CUDA程序一般都要求具有大量并行性,同时局部性也很重要,因为GPU没有能够隐藏延迟的硬件。
每个线程和block都有自己专属的私有内存,而各个kernel之间有共享的全局内存。
同步:
- 一个block中的线程可能会互相同步
- block可以通过原子内存操作来协调运行
- 例如通过一个共享的自增队列指针
- 互相依赖的kernel可能有隐式的barrier
访问同一个内存地址会造成冲突,变成顺序的访问。连续的32位字被分配给连续的地址。对全局内存也会有这种问题,从Fermi架构开始,全局内存地址会被hash,从而全局地址冲突不会再发生。
每一个load指令都会带来一系列对齐且连续的内存,称为页。硬件自动将从一个warp的不同线程发出的请求合并到同一个page。
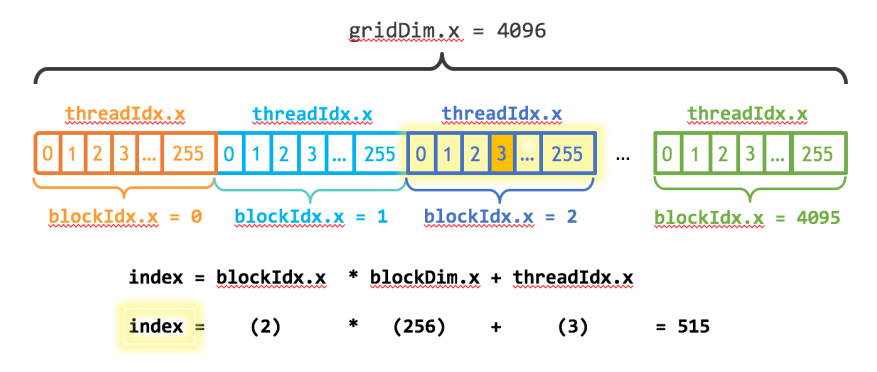
以下代码启动256个线程计算数组和。
1 |
|
如果想用更多的线程的话:
1 | __global__ |
更多指的是numBlocks * blockSize:
1 | int blockSize = 256; |
lecture 9
互联网络的特性:
- 直径:给定一对节点之间最短路径的最大值(在所有节点对上)。
- 延迟:多久能到达一个节点,即发送和接收时间之间的延迟
- 不同体系结构的延迟往往差异很大
- 供应商经常报告硬件延迟(连线时间)
- 应用程序程序员关心软件延迟(用户程序到用户程序)
- 观察结果:
- 网络设计的延迟相差1-2个数量级
- 源/目标成本下的软件/硬件开销占主导地位(1s-10s usecs)
- 硬件延迟随距离变化(每跳10s-100s纳秒),但与开销相比较小
- 延迟是包含许多小消息的程序的关键
- 带宽:单位时间内能传输多少数据
- 对大消息的传输很重要
- 对分带宽:将网络分成相同两部分的最小切割上的带宽
- 对所有进程都需要和其他进程通信的算法很重要
设计网络的参数:
- 拓扑结构
- crossbar、ring、2-D、3-D、超立方、树形、
- butterfly
- 真正的超立方体展开版本。
- d维蝶形具有(d+1)2d“交换节点”(不要与处理器混淆,即n=2d)
- 发明蝴蝶是因为超立方体需要随着网络变大而增加交换机基数;当时禁止
- 直径=log n。等分带宽=n
- 无路径多样性:对抗性流量不好
- 参见高等计算机体系结构课程
- 路由算法
- all east-west then all north-south
- 发送策略
- circuit:对整个信息使用全部链路
- packet:信息拆分成单独的消息发送
- 流量控制
- 消息暂时存储在buffer中、数据重新路由等
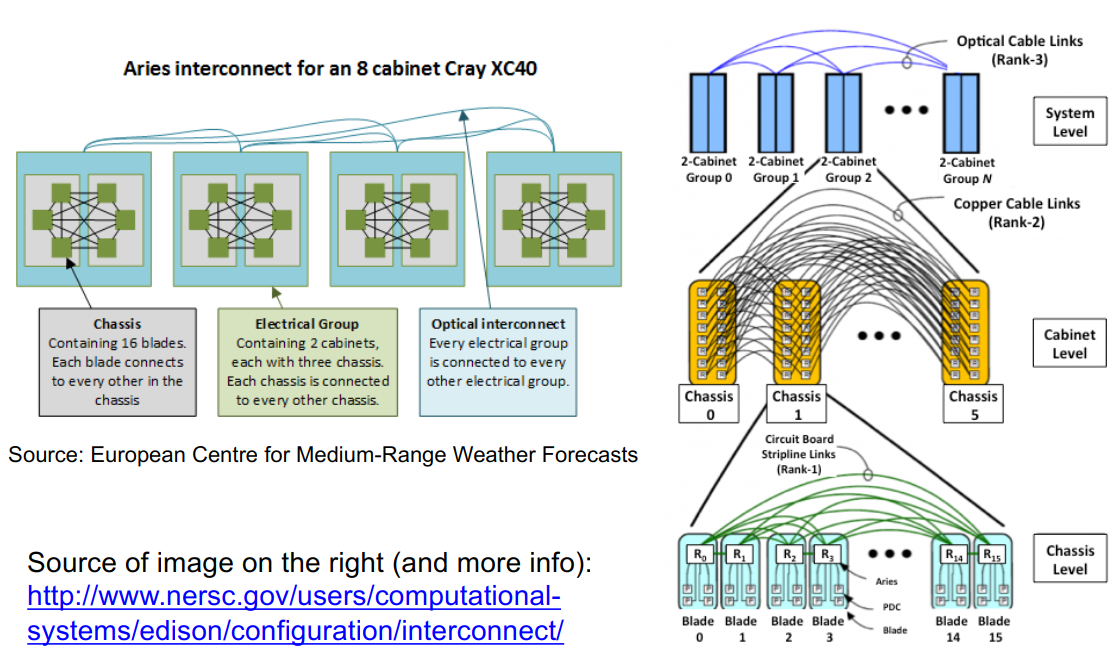
dragonflies:
- 利用光互连(在机房机柜之间)和电气网络(机柜内部)之间的成本和性能差距
- 光纤(光纤)更昂贵,但较长时带宽更高
- 电力(铜)网络更便宜,短路时更快
- 在层次结构中组合:
- 使用全对全链路将多个组连接在一起,即每个组至少有一个直接连接到其他组的链路。
- 每个组内的拓扑可以是任何拓扑。
- 使用随机路由算法
- 结果:程序员可以(通常)忽略拓扑,获得良好的性能
- 在虚拟化动态环境中非常重要
- 缺点:性能可变
在负载平衡的情况下,最小路由工作得很好,在大量的流量模式中可能会造成灾难性的后果。
随机化思想:对于路由器Rs上的每个数据包,并发送至另一组Rd中的路由器,首先将其路由到中间组。
发送消息的时间大概是:T = latency+n*cost_per_word = latency + n / bandwidth,也叫做Time = α + n * β。通常α远大于β。一个长消息比多个短消息更划算,同时需要较大的计算-通信比。
MPI:进程可以被分组,每个消息必须以一个上下文发送/接收。一个分组+上下文共同组成一个通信域。
MPI消息数据可以用一个(地址,数量,类型)三元组描述,有如下类型:
- 预先定义的语言相关类型
- 某类型的连续数组
- 一个数据块
- 一些块数据
- 随机类型的数据
MPI消息发送时会跟上一个用户定义的tag,来协助识别消息。
只有mpi_send时等待完成,或者mpi_send后返回,recv时在某个时间段等待,才能避免创建buffer。
MPI非阻塞操作返回request
1 | MPI_Request request; |
可以通过测试来等待:
1 | MPI_Test(&request, &flag, &status); |
在未完成通信时访问缓冲区是未定义的
可以同时等待多个:
1 | MPI_Waitall(count, array_of_requests,array_of_statuses) |
MPI提供多种发送消息的模式:
- 同步模式(MPI_Ssend):在匹配的接收开始之前,发送不会完成。(不安全程序死锁。)
- 缓冲模式(MPI_Bsend):用户向系统提供一个缓冲区供其使用。用户分配足够的内存使不安全的程序安全。
- 就绪模式(MPI_Rsend):用户保证已发布匹配的接收。
- 允许访问快速协议
- 如果匹配接收未发布,则未定义行为
集合操作:包括broadcast、gather/scatter,allgather、alltoall、reduce、scan。
MXX是一个MPI的库,基于MPI在交换不规则数据的时候以下的几种复杂操作:
- 交换不规则数据时麻烦
- 交换数量
- 拷贝数据
- 分配空间
- 交换实际数据
- 创建派生的非PDO类型
- 将用户定义函数映射给MPI
而MXX只要如下:
1 | // lets take some pairs and find the one with the max second element |
SUMMA:可扩展矩阵乘法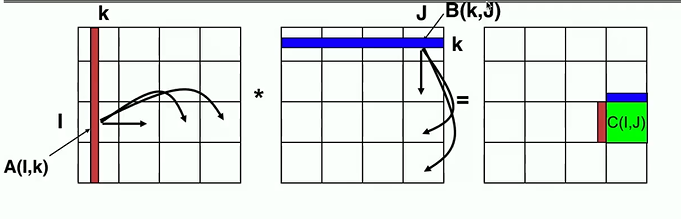
C(I, J) = C(I, J) + ∑k(A(I, k) * B(k, J)),其中I,J代表一个进程所有的行列,k是单独的一行或列,或者一块。
对于每个k(0和n-1之间),
- 部分K行的所有者沿其进程列广播该行
- 部分K列的所有者沿其进程行广播该列
完整算法:
1 | 在每个进程P(i, j): |
如果是P^(1/2)*P^(1/2)剖分:
1 | For k=0 to n/b-1 |
1 | void SUMMA(double *mA, double *mB, double *mc, int p_c) |
int MPI_Comm_split(MPI_Comm Comm, int color, int key, MPI_Comm* newcomm)中MPI的内部算法:
- 使用
MPI_Allgather从每个进程获取颜色和键 - 统计相同颜色的进程数;创建一个具有这么多进程的通信器。如果此进程将
MPI_UNDEFINED为颜色,请创建一个具有单个成员的进程。 - 使用键对列组进行排序
- 颜色:控制newcomm的分配
- 键:控制newcomm内的rank分配
MPI内建的集合操作:
MPI_MAX:MaximumMPI_MIN:MinimumMPI_PROD:ProductMPI_SUM:SumMPI_LAND:Logical andMPI_LOR:Logical orMPI_LXOR:Logical exclusive orMPI_BAND:Binary andMPI_BOR:Binary orMPI_BXOR:Binary exclusive orMPI_MAXLOC:Maximum and locationMPI_MINLOC:Minimum and location
集合操作实现的示例:MPI_AllReduce
- 所有进程必须接收相同的结果向量;
- 必须按照规范顺序m0 + m1 + … + mp-1进行归约(如果操作不是可交换的);
- 对于结果向量的所有元素,不严格要求使用相同的规约顺序和括号,但应努力做到这一点。
复杂度下界: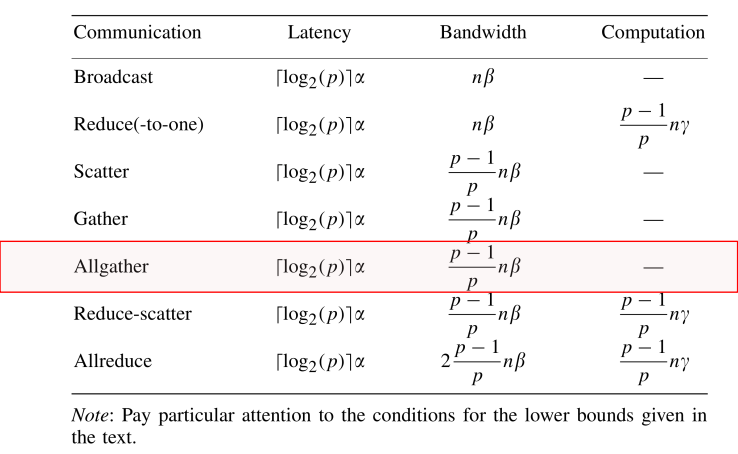
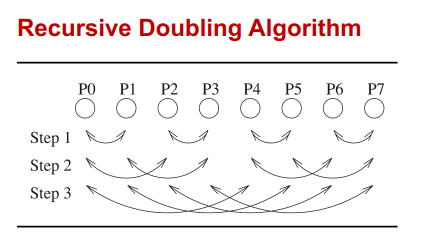
MPI_AllGather有几种实现:
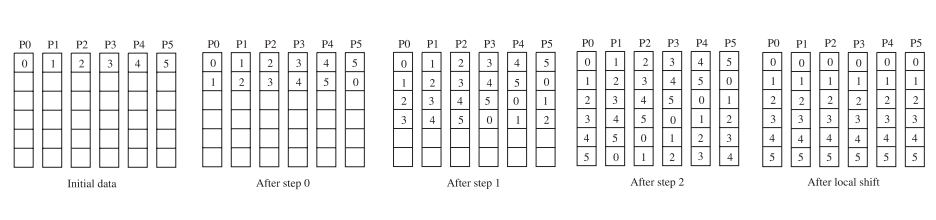
- 环算法:在0时刻,发送你自己的数据;在t时刻,把你在t-1时刻收到的数据发给你右边,从你左边接收新的数据;利用了带宽,但是有很高的延迟。在数据很大的时候使用,反而比下边的算法快很多,减少数据拷贝,降低通信次数,且只跟邻居通信。
- 递归算法:在t时刻,进程i与进程
i+2^t交换现有的所有数据,形成通信树结构。 - bruck算法;在t时刻,进程i从
i+2^t接受所有的数据,发送它自己所有的数据给i+2^t。该过程在lg(p)次后结束,在最后一次,仅收发最上边(p-2^(lg(p)))个数据。同时需要租后进行顺序调整。
SUMMA in MPI
1 | void SUMMA(double *mA, double *mB, double *mc, int p_c) |
MPI描述进程之间的并行性(使用单独的地址空间)Thread并行性在进程内提供共享内存模型
- OpenMP和pthread是常见的模型
- OpenMP为循环级并行提供了方便的功能。线程由编译器根据用户指令创建和管理。
- pthread提供了更复杂、更动态的方法。Thread由用户显式创建和管理。
在仅MPI编程中,每个MPI进程都有一个程序计数器。在MPI+线程混合编程中,可以同时执行多个线程。所有线程共享所有MPI对象(通讯器、请求)。MPI实施可能需要采取措施确保MPI堆栈的状态一致。
MPI的四个线程安全级别:MPI定义了四个线程安全级别
MPI_THREAD_SINGLE:应用程序中只存在一个线程MPI_THREAD_FUNNELED:多线程,但只有主线程进行MPI调用(调用MPI_Init_thread的调用)MPI_THREAD_SERIALIZED:多线程,但一次只能有一个线程进行MPI调用MPI_THREAD_MULTIPLE:多线程,任何线程都可以在任何时候(有一些限制以避免竞争)
MPI定义了MPI_Init的替代方案:MPI_Init_thread(requested, provided)
- 应用程序给出了它所需要的级别;MPI实现提供了它所支持的级别
MPI_THREAD_SINGLE时没有线程
1 | int main(int argc, char ** argv) |
MPI_THREAD_FUNNELED时所有MPI调用都是主线程在调用,在OpenMP并行区域外。
1 | int main(int argc, char ** argv) |
MPI_THREAD_SERIALIZED一次只能有一个线程调用MPI函数,这被critical regions保证。
1 | int main(int argc, char ** argv) |
MPI_THREAD_MULTIPLE任何线程都可以随时进行MPI调用(不受限制)
1 | int main(int argc, char ** argv) |
实现不需要支持高于MPI_THREAD_SINGLE的级别;也就是说,实现不需要是线程安全的。
调用MPI_Init(而不是MPI_Init_thread)的程序应假定只支持MPI_THREAD_SINGLE。不调用MPI_Init_thread的线程化MPI程序是不正确的程序。
MPI_THREAD_MULTIPLE的约定
- 排序:当多个线程同时进行MPI调用时,结果将是,调用在某些情况下按某些顺序执行
- 在每个线程内维护顺序
- 用户必须确保在同一个comm上进行集体操作,窗口或文件句柄在线程之间的顺序正确
- 例如,不能在一个线程上调用广播,在另一个线程上调用reduce
- 当线程处于同一位置时,用户有责任防止冲突MPI调用
- 例如,从一个线程访问信息对象并将其从另一线程释放。
- 阻塞:阻塞MPI调用将只阻塞调用线程,不会阻止其他线程运行或执行MPI
一个正确的例子:
1 | Proc 0 Proc 1 |
一个不正确的例子:
1 | Proc 0 Proc 1 |
P0和P1可以有不同的Bcast和Barrier顺序
在这里,用户必须使用某种类型的同步,以确保线程1或线程2在两个进程上都首先得到调度,否则Bcast可能与同一comm上的Barrier匹配,这在MPI中是不允许的。
单边通信模型的基本思想是将数据移动与进程同步解耦
应能够在不要求远程进程同步的情况下移动数据
每个进程向其他进程公开其内存的一部分
其他进程可以直接读取或写入该内存
创建公共内存
- 默认情况下,进程使用的任何内存都是只有本地可访问
- 分配内存后,用户必须进行显式MPI调用,以将内存区域声明为可远程访问
- 远程可访问内存的MPI术语是一个“窗口”
- 一组进程共同创建一个“窗口”
- 一旦内存区域被声明为可远程访问,窗口中的所有进程都可以向该内存读/写数据,而无需与目标进程显式同步
窗口创建存在四种模式
MPI_WIN_CREATE:您已经有一个分配的缓冲区,您希望远程访问该缓冲区MPI_WIN_ALLOCATE:您希望创建一个缓冲区并直接使其可远程访问MPI_WIN_CREATE_DYNAMIC:您还没有缓冲区,但将来会有缓冲区,且您可能希望在窗口中动态添加/删除缓冲区MPI_WIN_ALLOCATE_SHARED:您希望同一节点上的多个进程共享一个缓冲区
MPI_WIN_ALLOCATE:在RMA窗口中创建一个远端可访问的内存区域
1 | int MPI_Win_allocate(MPI_Aint size, int disp_unit, |
1 | int main(int argc, char ** argv) |
MPI提供了在远程可访问内存区域中读取、写入和原子修改数据的能力:
MPI_PUTMPI_GETMPI_ACCUMULATEMPI_GET_ACCUMULATEMPI_COMPARE_AND_SWAPMPI_FETCH_AND_OP
RMA同步模型
- RMA数据访问模型
- 何时允许进程读取/写入远程可访问内存?
- 进程X写入的数据何时可供进程Y读取?
- RMA同步模型定义了这些语义
- MPI提供的三种同步模型:
- Fence(主动目标)
- 启动后完全等待(通用活动目标)
- 锁定/解锁(被动目标)
- 数据访问发生在“epochs”内
- 访问时间:包含一组由源进程发出的操作
- 曝光时间:允许远程进程更新目标窗口
- epochs定义了顺序和完成语义
- 同步模型提供了建立epochs的机制
被动目标同步
- 开始/结束被动模式
- 目标进程不进行相应的MPI调用
- 可以启动多个被动目标事件到不同的进程
- 不允许同一进程的并发(影响线程)
- 锁
- 共享:其他使用共享的进程可以同时访问
- 独占:没有其他进程可以同时访问
共享内存和消息传递各有优缺点,共享内存更容易并行,容易竞争,且更容易陷入假共享之类的;消息传递需要做更多的工作,但是不容易死锁,具有很高的扩展性。
全局地址空间中,线程可以直接读写远端数据,给通信实现提供了方便。因此需要一种方式来命名全局空间。(以下使用UPC方式)
1 | shared int *p = upc_malloc(4); |
如果需要单边通信:
1 | a[i] = ...; *p = ...; upc_mem_put(...); |
lecture 11
PGAS编程的目标
- 应用:不规则代码的方便编程
- 图
- 哈希表
- 稀疏矩阵
- 自适应(分层)网格
- 机器:在计算机上显示最佳可用性能
- 小消息的低延迟
- 即使对于中等大小的消息,带宽也很高
- 高注入速率(消息数/秒)
- 最小化软件开销并匹配硬件
UPC++与MPI类似,也是SPMD程序,使用GASNet库通信。
1 |
|
用UPC++计算π如下:
1 | int main(int argc, char **argv) { |
一般的C++变量和对象在每个线程的私有内存空间分配。共享空间的变量需要用new_显式分配,用delete_释放,共享内存可以被远端进程访问:
1 | global_ptr<int> gptr = new_<int>(rank_me()); |
如果需要广播:
1 | global_ptr<int> gptr = |
future类型的变量有一个状态位,标志是否准备好,等待future类型就绪使用户可以实现异步操作。
1 | future<T> f1 = rget(gptr1); // asynchronous op |
单边通信如下,同时支持不连续内存数据:
1 | future<T> rget(global_ptr<T> src); |
同步操作:
- Barrier: block until all other threads arrive
barrier(); - Asynchronous barriers
1 | future<> f = |
UPC++有一部分集合操作,都是异步的
1 | template <typename T> future <T> |
远端过程调用:
1 | future<R> rpc(intrank_t r, |
在进程r执行func(args...)并返回结果,R是返回类型。
1 | int hits = 0; |
lecture 12
mapreduce模型:
- 每条记录是一个(key, value)
- map:
(K[in], V[in]) --> list(K[inter], V[inter]) - reduce:
(K[inter], list(V[inter])) --> list(K[out], V[out])
MapReduce着眼于更高级的数据并行,自动进行数据通信等,关注容错。
lecture 13
BLAS(1):对于向量的15个操作,对O(1)的数据做O(1)的操作。对于y = a * x + y这种需要2n的计算和3n的读写的操作,计算强度为2/3,读写更多,且不能向量化,所以出现了BLAS(2),主要针对矩阵-向量对进行25种操作,对O(2)的数据做O(2)的操作。BLAS(3),主要针对矩阵-矩阵对进行9种操作,对O(2)的数据做O(3)的操作,计算强度为(2n^3)/(4n^2)=n/2。LAPACK在BLAS是并行的时候才并行。
为什么要避免通信:
- 在DRAM间移动数据很费时;
- 算法运行时间由:
- flops * time_per_flop
- words moved / bandwidth
- messages * latency
- 组成,后两项是通信时间
- latency是最久的
- 需要将线性代数组织起来以免通信
blocked matrix multiply:C = A*B。将A、B和C切分成b*b,再分到每个进程,当b=1时退化成原始的矩阵乘。总共需要(n/b)^3 * 4b^2 = 4 * n^3 / b次读写,当(3*b^2)=cache时最小化。
对于矩阵乘的n^3算法,
- 串行算法, 且缓存为M
- 数据从主存中移动的下界为W (n^3 / M^(1/2) )
- 假定使用分块或者cache敏感的算法
- P个进程的并行算法
- M是每个进程的内存
- 数据从主存中移动的下界为W((n^3/p) / M^(1/2) )
- 如果M = 3n^2/p (每个矩阵的一份拷贝之和),下界为W (n^2 /p^(1/2) )
算法的目标:
- 尽量减少移动的数据
- 尽量减少发送的信息
- 需要新的数据结构
- 多个内存层次结构中最小化用量
- 当矩阵适合最快的内存时,运算/通信最少
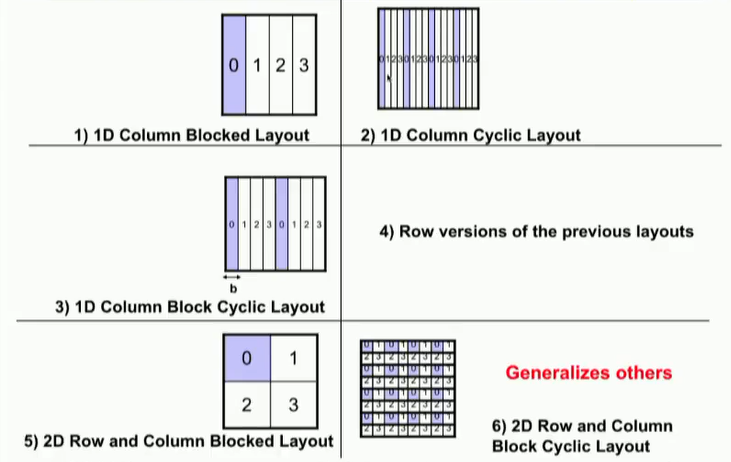
多种不同的矩阵剖分方法:
- 1D剖分
- 1D循环剖分
- 1D列块循环
- 对应1D的行剖分
- 2D剖分
- 2D循环剖分
并行矩阵-向量乘:计算y = y + A * x,使用1D行剖分,A(i)是n/p个进程i拥有的行,x(i)和y(i)类似,也是进程i拥有的数据。
对于每个进程:广播x(i),计算y(i)=A(i)*x。整个算法使用了y(i) = y(i) + A(i) * x = y(i) + ∑(j) A(i,j)*x(j)。
如果使用列剖分,减少了x的广播,但是增加了一步规约操作。2D块剖分使用了广播和规约,但都是对一个进程子集,通信开销会小一些。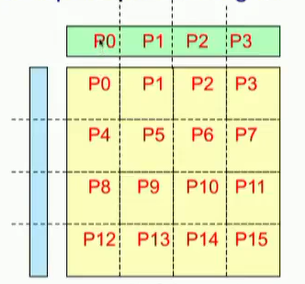
并行矩阵乘法:使用1D剖分且没有广播:
1 | C(myproc) = C(myproc) + A(myproc)*B(myproc,myproc) |
Cost of inner loop:
- computation:
2*n*(n/p)^2 = 2*n^3/p^2 - communication:
a + b*n^2 /p
Running time = (p*(p-1) + 1)*computation + p*(p-1)*communication = 2*n^3 + p^2*a + p*n^2*b
缺点是每次迭代只有一对进程是活跃的,只有i进程在计算。
改进:相邻的进程对可以同时通信:
1 | Copy A(myproc) into Tmp |
- 可能需要双倍的buffer
- 代码中没有考虑可能的死锁
- Time of inner loop =
2*(a + b*n^2/p) + 2*n*(n/p)^2 - Total Time =
2*n* (n/p)^2 + (p-1) * Time of inner loop=2*n^3/p + 2*p*a + 2*b*n^2
A(myproc)必须得发给每一个进程,最少开销(p-1)*cost of sending n*(n/p) words
并行效率 = 2*n^3 / (p * Total Time) = 1/(1 + a * p^2/(2*n^3) + b * p/(2*n) ) = 1/ (1 + O(p/n)),当n/p增加时负责度降低。
如果是2.5D矩阵乘:各个进程拥有cn^2 / P数据,总共数据组织成(P/c)^(1/2) * (P/c)^(1/2) * c网格。最开始进程P(i,j,0)拥有A(i,j)和B(i,j),每一个数组大小为n(c/P)^(1/2)*n(c/P)^(1/2)。
- 进程P(i,j,0)广播A(i,j)和B(i,j)给P(i,j,k)
- k阶的进程执行SUMMA
- 在k方向上对结果
∑(m) A(i,m)*B(m,j)规约,所以P(i,j,0)拥有了C(i,j)。
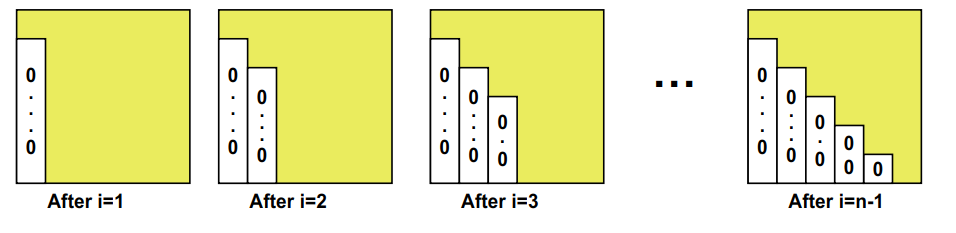
为了求解Ax=b,进行高斯消去。
1 | … for each column i |
高斯消去实际上也是求了一个LU分解,A=L*U,在求解方程A*x=b时
- 使用高斯消去分解A=L*U
- 求解L*y=b
- 求解U*x=y
- 因此
A*x = (L*U)*x = L*(U*x) = L*y = b
当矩阵A比较小或者有0时,可能会得到错误的结果。因此需要交换把A(i,i)变成一列里最大的,GEPP(Gaussian Elimination with Partial Pivoting)。
1 | for i = 1 to n-1 |
以上算法计算A=P*L*U,这是数值上很稳定的。
分块用于计算矩阵乘法,但是在这里由于数据依赖更多很难分块。使用“delayed updates”,将多个连续矩阵的更新保存到跟踪矩阵,之后在一个BLAS3(matmul)操作中同时应用多个更新。
首先要选择一个适当的“b”,这个b应该足够小,使包含b列的子矩阵能够满足cache的大小需要,同时应该足够大以使算法更快。
1 | for ib = 1 to n-1 step b … Process matrix b columns at a time |
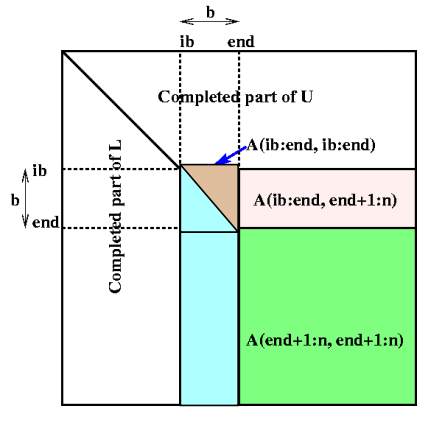
白色部分已经完成,只对中间部分处理。中间的小矩形为LL。贴上代码:
1 | SUBROUTINE SGETRF( M, N, A, LDA, IPIV, INFO ) |
在二维剖分中进行高斯消去: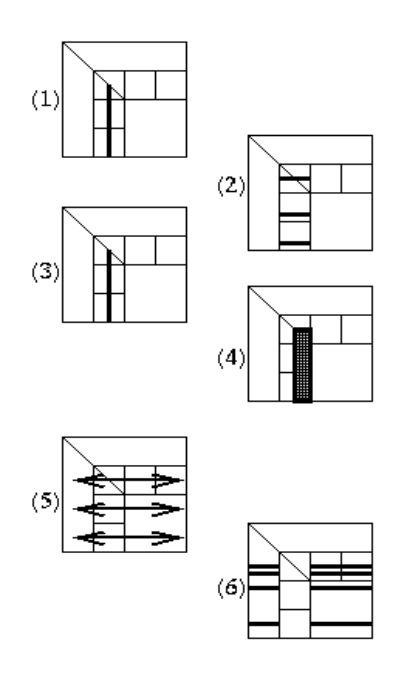
1 | for ib = 1 to n-1 step b |
lecture 15
compressed sparse row (CSR)存储:
- 大小为
nnz=非零值个数(val)数组 - 大小为
nnz的每个非零值的列索引数组 - 大小为
n=行数的行起始指针数组
其他常用格式(加分块)
- 压缩稀疏列(CSC)
- 坐标(COO):每个非零元素的行+列索引(易于构建)
SpMV with CSR算法对y的重用很多,但是对x的重用不足。
1 | for each row i: |
可能的优化:
- 把k循环展开,需要知道这一行有多少非零元素
- 把y[i]挪出for循环
- 压缩ind[i],需要知道非零元素出现的规律
- 重用x,需要很好的非零元素出现规律
- cache:需要知道非零元在附近的行
- register:需要知道这些非零元存在哪里
SpMV可以利用分块,不需要使用index存储每一个非零元,而是使用1个列序号存储非零r-c块?
Optimizations for SpMV
- Register blocking (RB): up to 4x over CSR
- Variable block splitting: 2.1x over CSR, 1.8x over RB
- Diagonals: 2x over CSR
- Reordering to create dense structure + splitting: 2x over CSR
- Symmetry: 2.8x over CSR, 2.6x over RB
- Cache blocking: 2.8x over CSR
- Multiple vectors (SpMM): 7x over CSR
- And combinations…
Sparse triangular solve
- Hybrid sparse/dense data structure: 1.8x over CSR
SpMV的行并行:对x的访问是随机的,而且没有线程之间的依赖关系,所以没有竞争/锁。剖分的话就根据非零元素的个数进行分割。与列并行相比,都是对y的随机读写,列并行需要同步操作。将行与列结合起来有更多并行性。
优化总结:
- NUMA-非统一内存访问
- 将子矩阵固定到分配给它们的核心附近的内存中
- 预取-值、索引和/或向量
- 对预取距离进行彻底搜索
- 矩阵压缩-不仅仅是寄存器分块(BCSR)
- 32或16位索引,子矩阵的块坐标格式
- 缓存阻塞
- 矩阵的2D分区,因此所需的x、y部分适合缓存
分布式SpMV的并行性:
- y=A*x,其中A是稀疏矩阵
- 行并行性(y和A)
- 跨处理器复制x
- 或者只交换必要的元素
- 非零是否聚集在一起,例如,接近对角线?
- 列并行性(x和A)
- 在所有处理器上设置临时y=[0, …];
- 更新该信息;并跨处理器添加reduce
- p很大和非零一致时的二维并行性
- 将处理器划分为p1 x p2(例如,方形网格)
- 使用混合行和列并行性
- 非零元素聚集时的负载平衡不良
lecture 17
一些机器学习算法与矩阵向量乘相关。隐式的并行是保持整体算法结构(操作序列)完整,并行化各个操作,如将BLAS操作并行化,通常可以获得完全相同的精度(例如,DNN训练中的模型并行性),如果算法的关键路径较长,则可扩展性可能会受到限制。
显式并行化:修改算法以获得更多的并行性,例如算法在单个模块上执行,这些模块的结果稍后可以合并。示例:DNNs中的CA-SVM和数据并行,可以实现显著更好的可扩展性。
训练即更新神经网络的权重。
梯度下降:为了最小化一个函数,以α速率的梯度方向朝相反方向移动,α是步长(也称为学习速率)。用作许多其他机器的优学习方法(示例:NMF)
随机梯度下降SGD,SGD因其“嘈杂”的梯度而避开尖锐的局部极小值。
并行化机会
- 数据并行性:分发输入(图像、文本、音频等)
- 批处理并行性:将每个完整样本分发到不同的处理器。当人们在文献中提到数据并行时,这就是他们99%的意思
- 域并行性
- 细分样本并将各部分分发给处理器。一种以前未经探索的并行方法。
- 模型并行性:分配神经网络(即其权重)
参数服务器中梯度的获取和更新可以同步或异步完成。
两者都有利弊。在异步不可再现的情况下,过度同步会影响性能,并可能会影响收敛
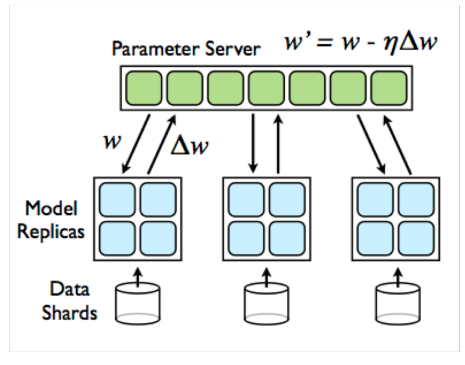
Dean, Jeffrey, et al. “Large scale distributed deep networks.” Advances in neural information processing systems. 2012.
为了避免参数服务器带来的瓶颈,两种方法:全局allreduce参数,或者进程之间两两互相交换参数。
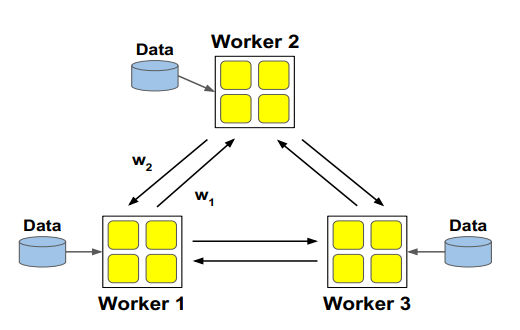
Peter Jin, Forrest Iandola, Kurt Keutzer, “How to scale distributed deep learning?” NIPS ML Sys 201
模型并行性的例子。图中显示了一个五层深度的神经网络,该网络具有独立性,被划分为四台机器(蓝色矩形)。只有跨越分区边界(粗线)的那些才需要它们的状态传输。即使在节点有多条边穿过分区边界的情况下,也会发送到该边界另一侧的计算机一次。
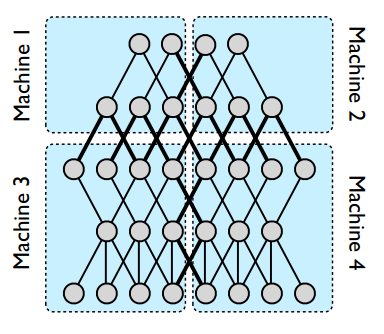
- 解释1:将神经网络划分到处理器
- 解释2:并行执行矩阵运算
在每个分区内,各个节点将跨所有可用的CPU核进行并行化。
在反向传播中,误差从最后一层传播到第一层,并且任何两个连续层之间都存在数据依赖性。相比之下,不同层的梯度是相互独立的。激活在前级从左到右传播; 错误在反向传播阶段从右向左传播。 梯度是使用激活和误差计算的。 每个箭头表示数据依赖性。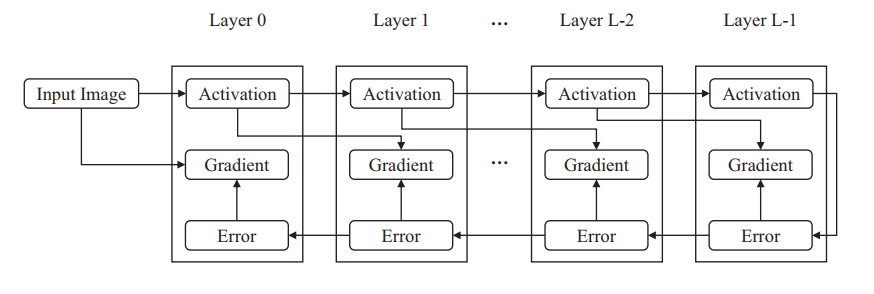
神经网络的SGD训练:如果看成是矩阵乘的话:权重矩阵(N✖M)乘以本层输入(M✖B)=本层输出(N✖B)。
其中权重W会被复制到每个处理器,所以是不会变的。输入和输出会由于数据并行而变得更小,例如,把输入矩阵切分到b=B/p大小
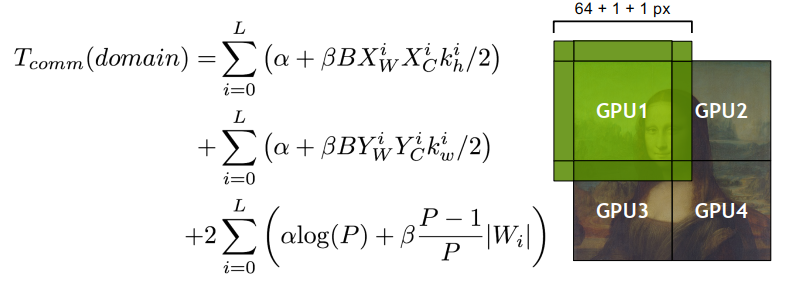
域并行(domain parallel):总体思路与用于在 HPC 中并行化模板代码的halo区域或ghost区域相同,在卷积之前,交换局部对应halo数据。
在向前和向后传递期间用于光环交换的附加通信
- 对于激活大小较大的早期层(即卷积层),成本可以忽略不计
分布式深度学习总结
- 大batch训练经常导致次优学习
- 集成并行使用避免通信的算法来扩展可扩展性,而不是增大batch大小
- 集成并行性将模型和数据(batch和domain)并行性最佳结合起来,并且通常比每个极端都表现得更好。
- 对全连接层(大参数)使用模型并行,对卷积层(大激活)使用数据并行通常更好
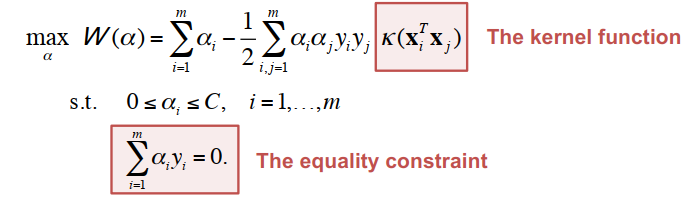
支持向量机:只有支持向量上的分类约束是活动的
- 导致巨大的二次约束优化 (QP) 问题
- 特殊算法,例如顺序最小优化 (SMO),将这个巨大的 QP 分解为更小的(实际上是最小的)QP 子问题。
在特征空间中的计算是耗时的,因为特征空间一般都是高维的。核方法解决这个问题。核方法用任意核函数替换线性模型的点积相似度,该函数计算 x 和 y 之间的相似度:K(x, y): X ✖ X ➡ R。
内核必须是对称的和半正定的。高斯核(即径向基函数)是ML中的事实上的核。K(x, x') = exp(-γ || x - x' ||^2)。我们可以预先计算核(Gram)矩阵,但这太耗时了。
下图中,2D (a) 中的圆形分类边界使用以下变换变为 3D (b) 中的线性边界:φ(x1, x2) = (x1^2, x2^2, 根下2 * x1 *x2)。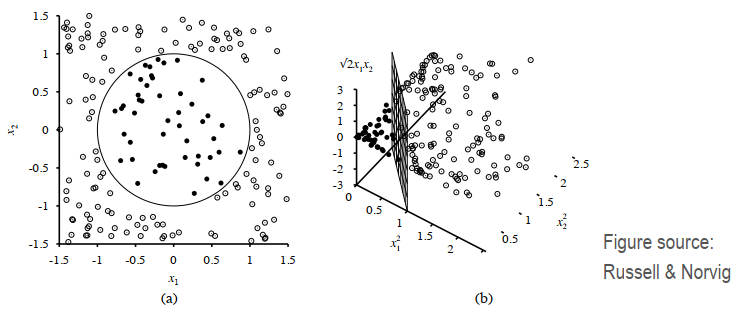
输入数据集是一个n✖d的矩阵,X1、X2、…、Xn都有一个d长度的特征向量。生成一个n✖n的核矩阵,K[i][j] = exp(-r||Xi - Xj||^2),r是一个正数。计算复杂度O(d*n^2),内存复杂度O(n^2),很小的输入会产生很大的核矩阵。357MB的输入(52K✖90) = 2000GB核矩阵。使用SMO(顺序最小优化)
- 采用迭代法,避免核矩阵
- 每次迭代使用两行核矩阵
- 稀疏输入的关键核:稀疏矩阵乘以稀疏向量
最小可能的优化问题一次涉及“两个”拉格朗日乘子,因为仅仅改变乘数会违反等式约束。
重复直到收敛:
- 选择一些对 αi 和 αj 进行下一步更新(使用试探法尝试选择这两个,这将使我们能够朝着全局最大值取得最大进展)。
- 相对于 αi 和 αj 重新优化 W(α),同时保持所有其他 αk 的固定。
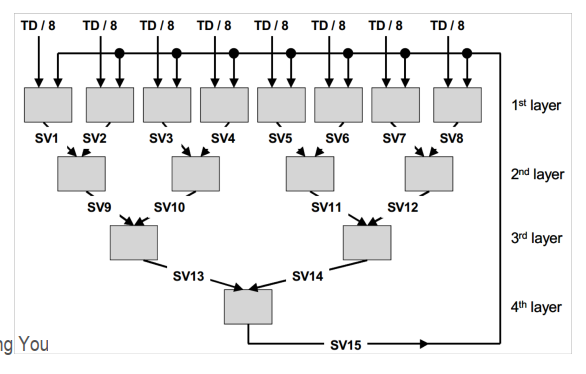
Cascade SVM:数据被分割均匀并由多个SVM处理。逐层去除非支持向量
- 数据是前一层的支持向量(SV)
- 将 SV 的参数 αi 传递到下一层以获得更好的启动(热启动)
Divide-and-Conquer SVM:全部数据在层与层之间传递;使用内核k-mean实现数据集的分割。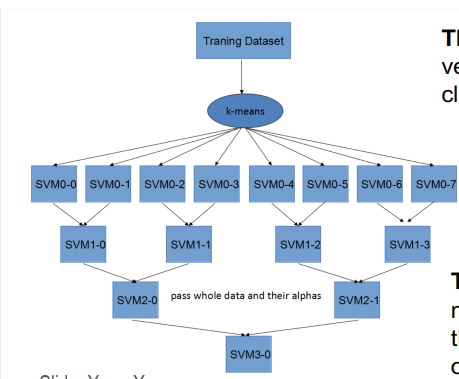
- 定理1:子问题的支持向量集接近于整个问题的支持向量集
- 定理2:内核 kmeans 最小化子问题的解与整个问题的解之间的差异
CP-SVM:
- divide:K-means将数据划分为P个部分
- conquer:欧氏距离选择最佳模型
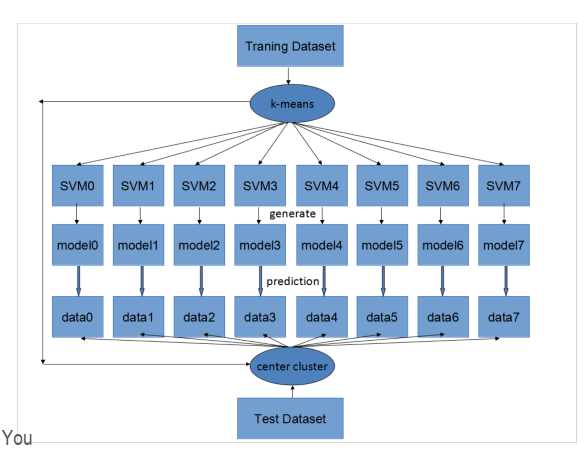
- 当
||Xi - Xj||^2很大时,exp(-r||Xi - Xj||^2)是0。 - K-means最大化了数据集之间的欧氏距离
- 这两个矩阵具有相似的 F 范数
- 分析假设高斯核:对于给定的样本,只有接近它的支持向量才能对分类产生影响
communication-avoid SVM:设计了一个均衡的聚簇来取代k-means,仍然尽可能近似kmeans的距离分离特性。
非负矩阵分解 (NMF):min{W≥0, H≥0} f(W, H) = 1/2 || A - WH ||^2。
m✖n矩阵A = m✖k矩阵W * k✖n矩阵H
- 具有非负约束的降维
- “分解”这个名字用词不当。 NMF 只是一个低秩近似,因为精确分解是 NP 难的
- NMF 是一系列方法,而不仅仅是一种算法
聚类
- 基于质心(k 均值、k 中值和变体)
- 基于流(马尔可夫聚类)
- 谱方法
- 基于密度(DBSCAN、OPTICS)
- 凝聚方法(单链聚类)
通常,正确的方法取决于输入特征并需要一些领域知识。我们将讨论两种并行算法:谱聚类和马尔可夫聚类 (MCL)。
谱聚类
- 输入:数据点之间的相似性
- 计算相似度的许多方法,有些是特定领域的:余弦、Jaccard 指数、Pearson 相关性、Spearman’s rho、Bhattacharyya 距离、LOD 分数……
- 我们可以用图表示数据点之间的关系,通过点之间的相似性对边进行加权
图定义
- ε-邻域图
- 确定阈值 ε,如果两点之间的亲和力大于 ε,则加入这条边。
- k-最近邻
– 在节点与其 k 个最近邻居之间插入边。
– 每个节点将连接到(至少)k 个节点。 - 全连接
– 在每对节点之间插入一条边。
谱聚类
- 图形的最小割确定了数据的最佳分区。
- 谱聚类:递归分割数据集
- 确定最小割
- 去除边
- 重复直到识别出 k 个集群
- 问题:识别最小割是NP 难的。
- 存在使用线性代数的有效近似值,基于拉普拉斯矩阵或图拉普拉斯算子
图拉普拉斯算子
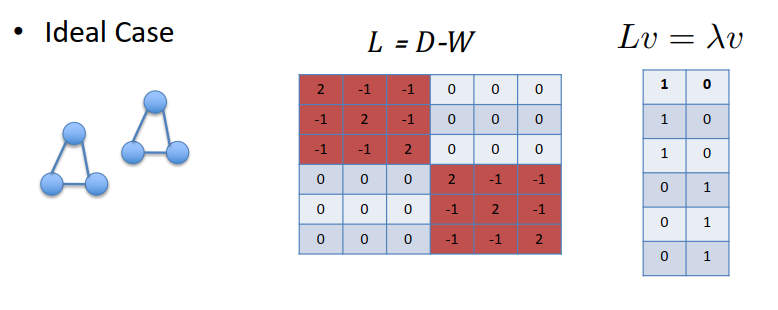
- 非标准化图拉普拉斯算子:L = D - W
- 标准化图拉普拉斯算子:
- L(sym) = D^(-1/2) * L * D^(-1/2) = I - D^(-1/2) * W * D^(-1/2)
- L(rw) = D^(-1) * L = I - D^(-1) * W
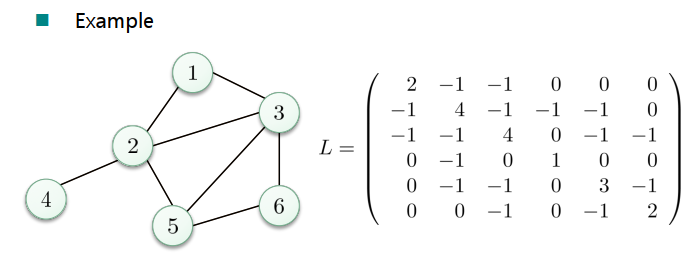
- 特征值 0 的多重性给出了集群的数量(在这种理想情况下:连接的分量的数量)。
- 假设真实情况是这种情况的近似。
如何计算那些最小的特征向量?
- 通过 Lanczos 算法实现
- workhorse是稀疏矩阵向量 (SpMV) 乘法
- SpMV 没有/最小化的数据重用,受通信限制
- 为了优化稀疏矩阵向量乘法并最小化其通信,我们绘制分区图(下一讲)
- 替代算法是可能的
- 幂迭代(power iteration)更廉价但数值不稳定
- LOBPCG(局部优化块预处理共轭梯度,Locally-Optimized Block Preconditioned Conjugate Gradient)使用稀疏矩阵乘以多个向量,由于可能的数据重用,因此具有更有利的性能。
- 最后,您可能只想调用现有的东西。
- ARPACK 实现反向通信特征求解器:您实现 SpMV,它实现数字外部逻辑
- PARPACK 是它的并行版本,以下代码使用它:https://github.com/openbigdatagroup/pspectraclustering
lecture 18
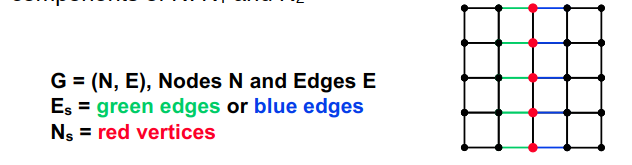
图分区的定义
- 给定一个图 G = (N, E, WN, WE)
- N = 节点(或顶点),
- WN = 节点权重
- E = 边
- WE = 边权重
- 例如:N = {tasks},WN = {task cost},E 中的边 (j,k) 表示任务 j 将 WE(j,k) 字节发送到任务 k
- 选择一个分区 N = N1 U N2 U … U NP 使得
- 每个 Nj 中节点权重的总和大致相同
- 最小化连接所有不同对 Nj 和 Nk 的边的所有边权重之和
- 例如:平衡工作负载,同时尽量减少通信
- N = N1 U N2 的特例:图二分
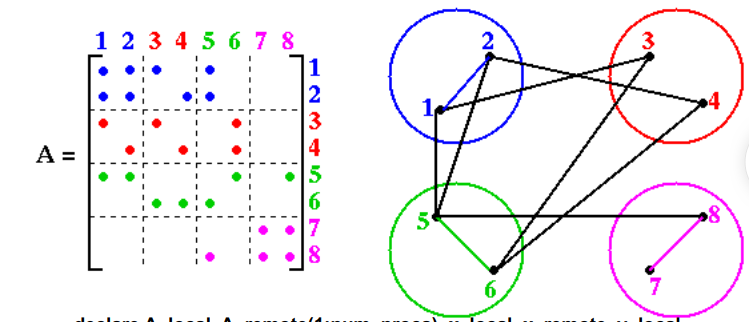
稀疏矩阵向量乘法y = y +A*x分割稀疏对称矩阵
1 | … declare A_local, A_remote(1:num_procs), x_local, x_remote, y_local |
选择最优分区是 NP 完全的
- (NP-complete = 我们可以证明它是非确定多项式时间类中其他众所周知的难题)
- 只有已知的精确算法具有成本 = 指数(n)
- 我们需要好的启发式方法
第一个启发式:重复图二分法
- 将 N 分成 2^k 个部分
- 递归地平分图 k 次
今后主要讨论图二分法
边分隔符与顶点分隔符
- 边分隔符:如果从 E 中删除 Es,留下 N 的两个大小相等、不相连的分量:N1 和 N2,则 Es(E 的子集)分隔 G
- 顶点分隔符:如果移除 Ns 和所有的相关边,留下两个大小相等、不连贯的N的组成部分:N1和N2,就说Ns(N 的子集)分割G
- 从 Es 生成 Ns:选择 Es 中每条边的一个端点
- |Ns| ≤ |Es|
- 从一个 Ns 生成一个 Es:选取所有在 Ns 上的边
- |Es| ≤ d * |Ns|,其中 d 是图的最大度数
- 我们会找到边缘或顶点分隔符,因为它们很方便
使用节点坐标(Nodal Coordinates)进行分区
- 每个节点都有 x,y,z 坐标 ➡ 分区空间
不使用节点坐标(Nodal Coordinates)进行分区 - 网络文档的稀疏矩阵
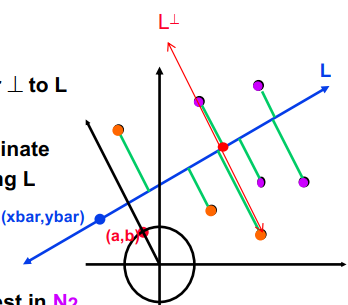
节点坐标:惯性分区
- 对于二维上的图,选择一条分割图的线
- 在 3D 中,选择一个平面,但为了简单起见考虑 2D
- 选择一条线 L,然后选择一条垂直于它的线 LT,两边各有一半节点
- 选择一条直线 L 通过这些点。L 由
a*(x-xbar)+b*(y-ybar)=0给出,其中a^2+b^2=1;(a,b) 是单位向量垂直于L - 将每个点投影到线上。对于每个
nj = (xj,yj),计算沿 L 的坐标Sj = -b*(xj-xbar) + a*(yj-ybar) - 计算中位数。让 Sbar = median(S1, …, Sn)
- 使用中值划分节点。让 Sj < Sbar 的节点在 N1 中,剩余的在 N2 中
节点坐标:摘要
- 这些算法的其他变体
- 算法高效
- 依赖于节点(主要)连接到空间中最近邻的图
- 算法不依赖于实际边的位置!
- 当图来自物理模型时很常见
- 忽略边,但可以用作后续检查边的分区的良好起始
- 如果图连通性不是空间的,则效果不佳:
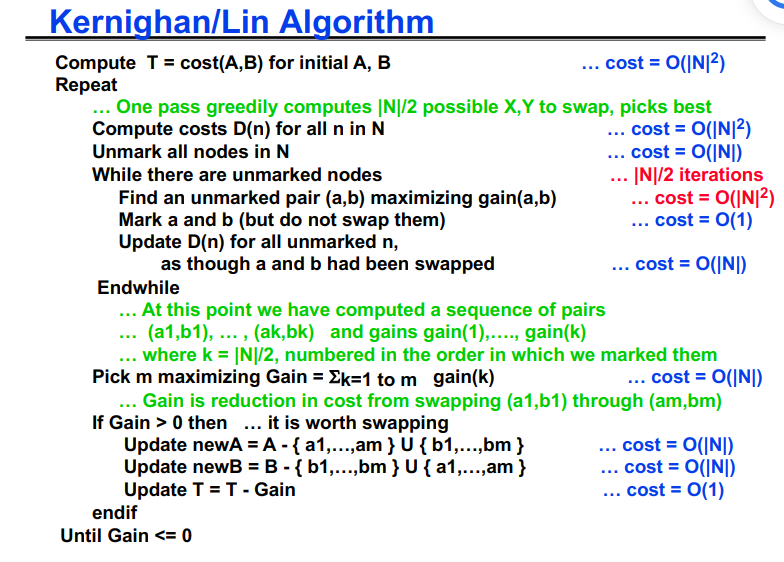
图分块的无须坐标系的方法:Kernighan/Lin
- 取一个初始分区并迭代改进它
- Kernighan/Lin (1970),开销 = O(|N|^3)
- Fiduccia/Mattheyses (1982),开销 = O(|E|),更好,但更复杂
- 给定 G = (N, E, WE) 和分区 N = A U B,其中 |A| = |B|
- T = cost(A,B) = ∑ {W(e) 其中 e 连接 A 和 B 中的节点}
- 使用|X| = |Y|,查找A的子集X和B的Y
- 如果可以降低成本,请考虑交换 X 和 Y:
- newA = (A – X) U Y 和 newB = (B – Y) U X
- newT = cost(newA, newB) < T = cost(A,B)
- 需要为许多可能的 X 和 Y 有效地计算 newT,选择最小(最佳)
Kernighan/Lin:初步定义
- T = cost(A, B), newT = cost(newA, newB)
- 需要一个有效的newT公式; 将使用
- E(a) = A 中 a 的外部开销 = ∑ {W(a,b) for B in b}
- I(a) = A 中 a 的内部成本 = S {W(a,a) for other a’ in A}
- D(a) = A 中 a 的成本 = E(a) - I(a)
- E(b)、I(b) 和 D(b) 对于 B 中的 b 定义类似
- 考虑交换 X = {a} 和 Y = {b}
- newA = (A - {a}) U {b}
- newB = (B - {b}) U {a}
- newT = T - ( D(a) + D(b) - 2*w(a,b) ) ≡ T - gain(a,b)
- gain(a,b) 衡量通过交换 a 和 b 获得的改进
- 更新公式
newD(a') = D(a') + 2*w(a',a) - 2*w(a',b)对于 A 中的 a’,a’ ≠ anewD(b') = D(b') + 2*w(b',b) - 2*w(b',a)对于 B 中的 b’,b’ ≠ b
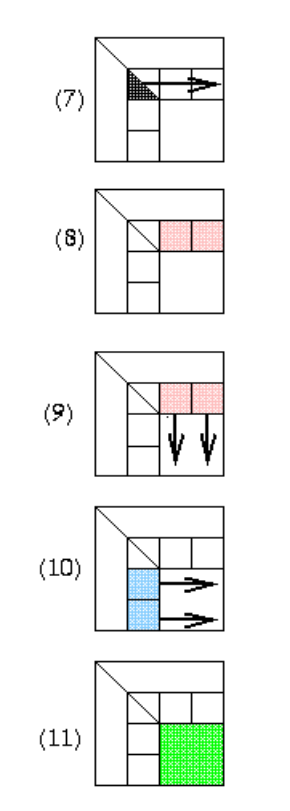
红色是第一部分,黑色是第二部分,最开始的切分是随机的,none (8);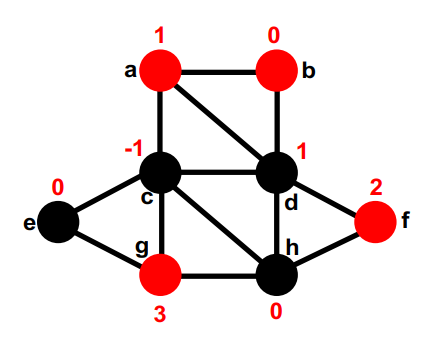
第一部分中最大的gain的是g,把g挪到第二部分,同时计算g的邻居的gain。暂时移动的节点是空心圆。暂时移动节点的gain无关紧要。none (8); g,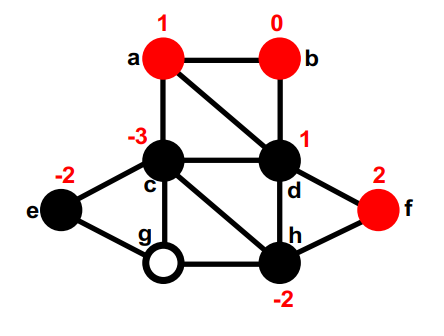
第二部分的gain最大的是d,暂时移动到第一部分,重新计算d的邻居的gain,在这之后,图的切是4。none (8); g, d (4);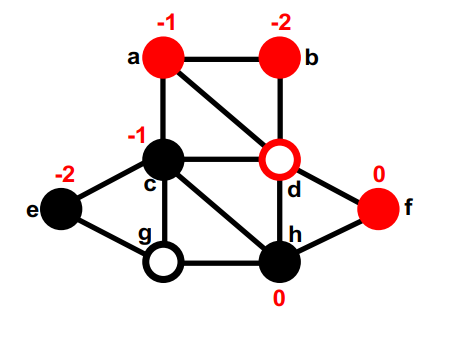
第一部分中没有移动过的最大的gain的是f。暂时移动到第二部分,重新计算它邻居的gain。none (8); g, d (4); f,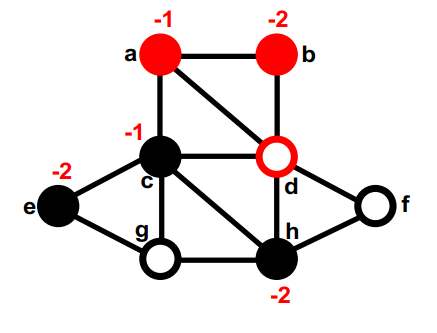
第二部分中没有移动过的最大的gain的是c,暂时移动到第一部分,重新计算c的邻居的gain,这次交换后,这个图的切是5。none (8); g, d (4); f, c (5);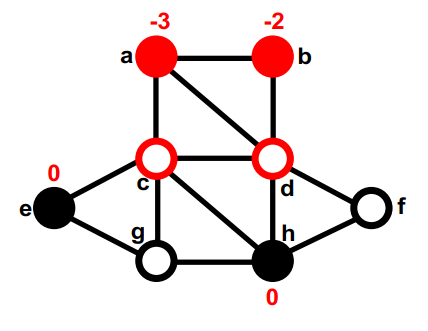
第一部分中没有移动过的最大的gain的是b,暂时移动到第二部分,重新计算b的邻居的gain。none (8); g, d (4); f, c (5); b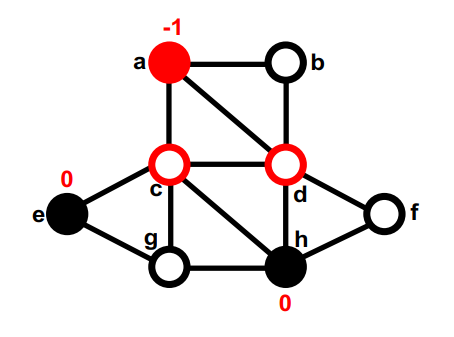
第 2 部分中两个未移动节点之间的最大gain存在联系。我们选择一个(比如e)并暂时将其移至 Part1。 它没有未移动的邻居,因此不会重新计算gain。这次交换后,这个图的切是7。none (8); g, d (4); f, c (5); b, e (7);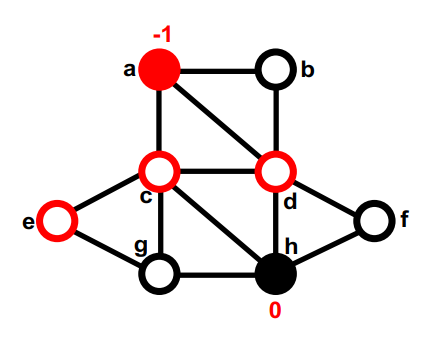
第一部分中没有移动过的最大的gain的是a,暂时移动到第二部分,它没有未移动的邻居,因此不会重新计算gain。none (8); g, d (4); f, c (5); b, e (7); a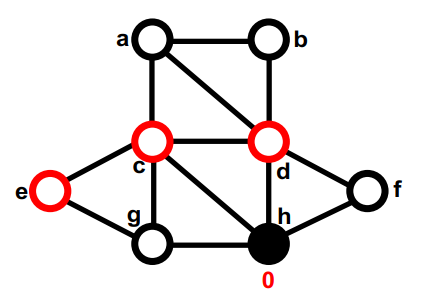
第二部分中没有移动过的最大的gain的是a,暂时移动到第一部分,它没有未移动的邻居,因此不会重新计算gain。最终临时交换后的切大小为 8,和任何动作之前一样。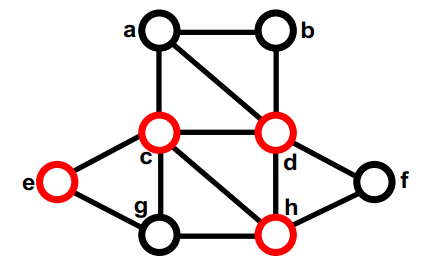
在每个节点都被暂时移动后,我们看到交换 g 和 d 后,最小的切割是 4。 我们使该交换永久化并撤消所有后来的临时交换。这是第一个改进步骤的结束。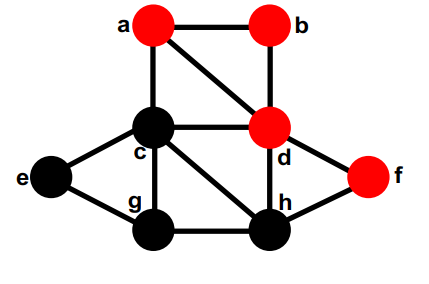
现在我们重新计算gain并从新的最小切4开始进行另一个改进步骤。 细节没有显示。 第二个改进步骤不改变切大小,所以算法以切为4结束。 一般来说,只要切不断变小,我们就会继续进行改进步骤。
Kernighan/Lin 算法
- 最耗时的线以红色显示,O(n3)
- 某些gain(k)可能为负,但如果后来的gain很大,则最终gain可能为正
- 可以避免局部最小值,其中切换没有任何帮助
- 我们重复多少次?
- K/L 在非常小的图 (|N|<=360) 上测试并在 2-4 次扫描后收敛
- 对于(具有理论意义的)随机图,一步收敛的概率似乎下降为 2^(-|N|/30)
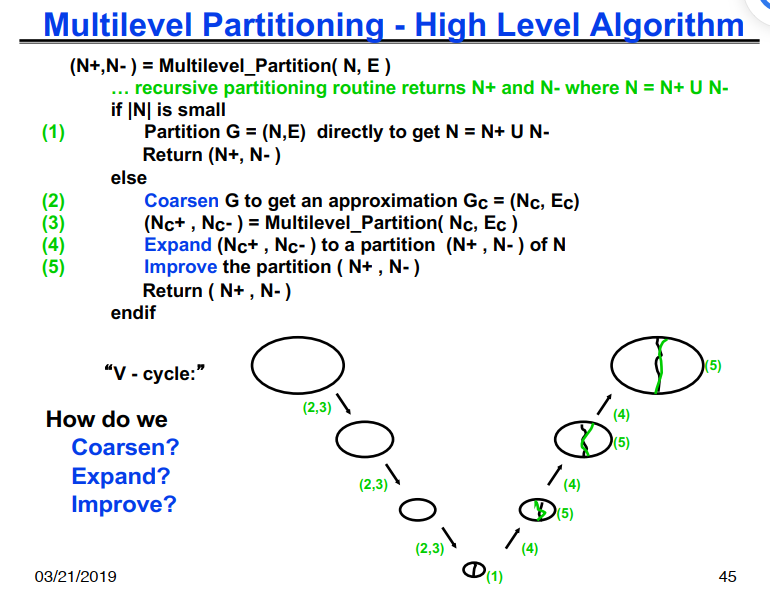
多级分区简介
- 如果我们想对 G(N,E) 进行划分,但它太大而无法有效地进行,我们该怎么办?
- 将 G(N,E) 替换为粗近似 Gc(Nc,Ec),并划分 Gc
- 使用Gc的分区得到G的粗略分区,然后迭代改进
- 如果 Gc 仍然太大怎么办?
- 递归应用相同的想法
最大匹配
- 定义:图 G(N,E) 的匹配是 E 的子集 Em,使得 Em 中没有两条边共享端点
- 定义:图 G(N,E) 的最大匹配是一个匹配Em,不能添加更多边并保持匹配
- 一个简单的贪心算法计算最大匹配:
1 | let Em be empty |
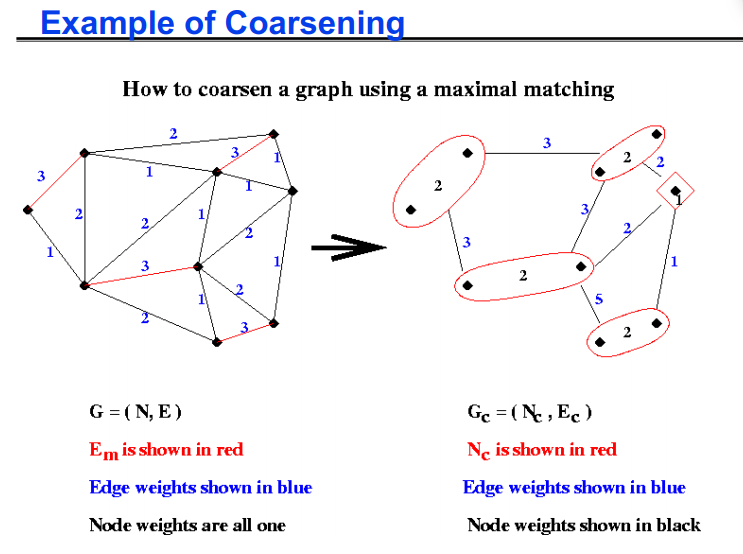
1 | 1) 构建G(N, E)的最大匹配Em |
通过稀疏矩阵-矩阵乘进行简化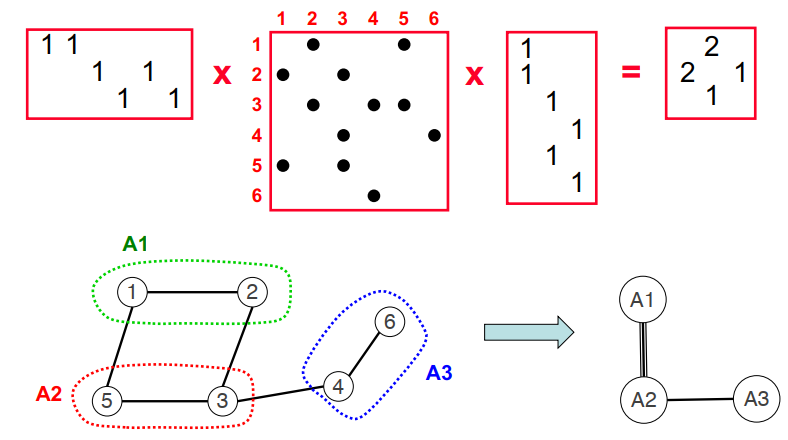
Parallel sparse matrix-matrix multiplication and indexing:
Implementation and experiments. SIAM Journal of Scientific Computing (SISC), 2012
一些实现
- Multilevel Kernighan/Lin
- METIS and ParMETIS (glaros.dtc.umn.edu/gkhome/views/metis)
- SCOTCH and PT-SCOTCH (www.labri.fr/perso/pelegrin/scotch/)
- Matlab toolbox for geometric and spectral partitioning by Gilbert, Tang, and Li: https://github.com/YingzhouLi/meshpart
- Multilevel Spectral Bisection
- S. Barnard and H. Simon, - A fast multilevel implementation of recursive spectral bisection …, 1993
- Chaco (SC’14 Test of Time Award)
- Hybrids possible
- Ex: Use Kernighan/Lin to improve a partition from spectral bisection
- Recent packages with collection of techniques
- Zoltan (www.cs.sandia.gov/Zoltan)
- KaHIP (http://algo2.iti.kit.edu/kahip/)
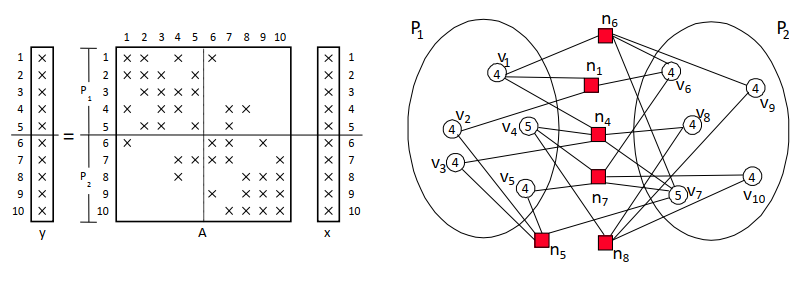
超越简单的图划分:将稀疏矩阵表示为超图
edge (vi, vj) ∈ E ➡ y(i) ⬅ y(i) + A(i,j) x(j) and y(j) ⬅ y(j) + A(j,i) x(i)
P1 performs: y(4) ⬅ y(4) + A(4,7) x(7) and y(5) ⬅ y(5) + A(5,7) x(7)
x(7) only needs to be communicated once !
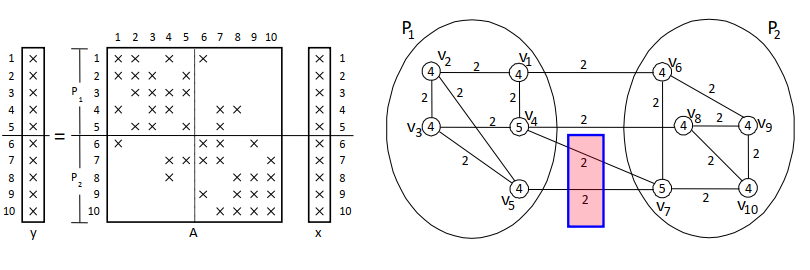
- 块-行分布的列-网模型
- 行是顶点,列是网络(超边)
两种不同的2D网格分块方法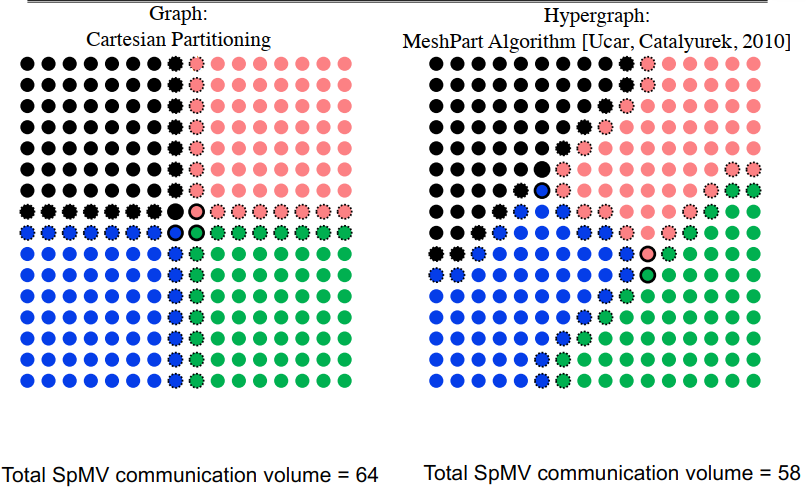
分区质量最重要
- 当结构在模拟过程中动态变化时,需要动态分区
- 速度可能比质量更重要
- 分区器必须并行快速运行
- 这里还有一个先有鸡还是先有蛋的问题
- 分区应该是增量的
- 相对于之前的变化最小
- 不得使用过多内存
- 最近关于流分区的研究:
- Stanton, I. and Kliot, G., “Streaming graph partitioning for large distributed graphs”. KDD, 2012
lecture 19
这一节中定义了i = sqrt(-1)。
一个有m个元素的向量v的离散傅里叶变换(DFT)为F*v,其中F是一个m*m的矩阵,F(j,k)=ω^(j*k), 0 ≤ j,k ≤ m-1,其中ω=e^(2πi/m)=cos(2π/m)+i*sin(2π/m),ω是一个复数,它的m次方ω^m=1。例如m=4,则ω=i, ω^2=-1, ω^3=-i, ω^4=1。m*m二维矩阵V的DFT为F*V*F。
快速傅里叶变换主要用在图像处理、信号处理,求解泊松方程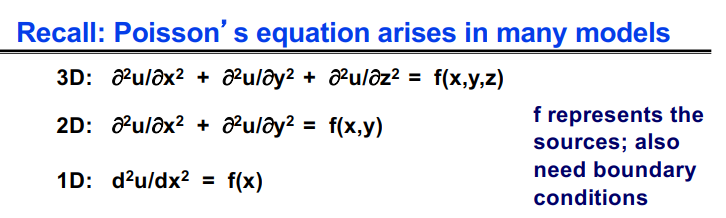
分别在一维二维条件下求解泊松方程: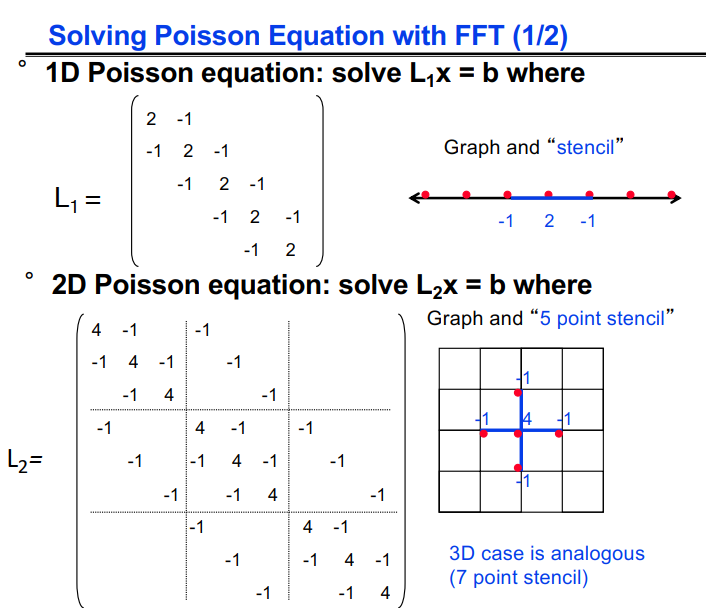
因为L1=F·D·FT,是特征值/特征向量分解,F与FFT很相似,F(j,k)=(2/(n+1))^(1/2) · sin(j k π /(n+1)),D是特征值的对角矩阵,D(j,j)=2(1-cos(j π/(n+1)))。
二维泊松与L1 · X + X · L1 = B类似,
FFT的串行算法:计算m个元素的向量v的FFT(F*v),(F*v)[j] = ∑(k=0,m-1)(F(j,k)*v(k)) = ∑(k=0,m-1)(ω^(j*k)*v(k)) = ∑(k=0,m-1)((ω^j)^k*v(k)) = V((ω^j)),V是多项式V(x)=∑(k=0,m-1)(x^k * v(k))。
FFT类似在m个点上评估一个m-1阶多项式V(x)。
V可以用分治来计算:V(x)=∑(k=0,m-1)(x^k * v(k))=v[0] + x^2 * v[2] + x^4 * v[4] + ... + x*(v[1] + x^2 * v[3] + x^4 * v[5] + ...) = Veven(x^2) = Vodd(x^2)。
V的阶为m-1,所以Veven和Vodd是m/2-1阶的多项式。
1 | FFT(v, ω, m) … assume m is a power of 2 |
Cost: T(m) = 2T(m/2)+O(m) = O(m log m) operations.
FFT的分治算法画图是一个完全二叉树: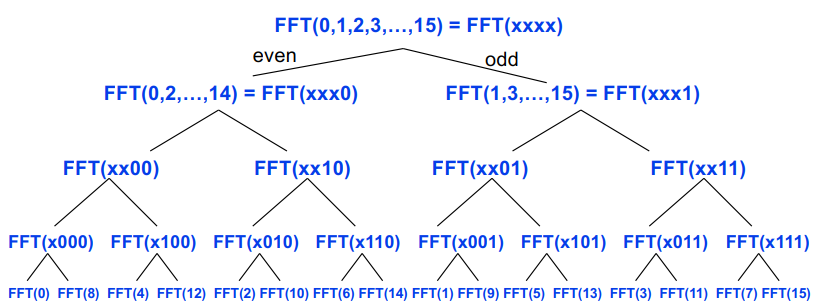
消息发送延迟的来源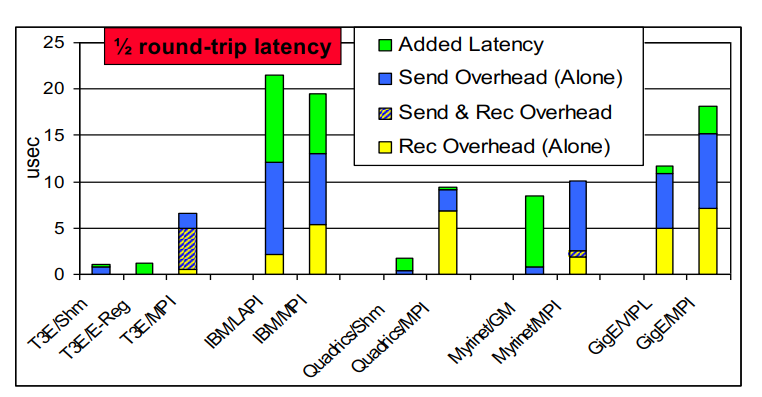
一般地,重叠意味着同时计算和通信,(或与其他通信对象通信,又名流水线)
重叠的潜力是gap和开销之间的差异
- 如果在整个消息发送过程中 CPU 被占用,则没有潜力
- 例如,没有发送端 DMA
- 具有 DMA 的机器的潜力随着消息大小的增长而增长(每字节成本由网络处理,即 NIC)
- 潜力随着网络拥塞量的增加而增长
- 因为差距随着网络变得饱和而增长
对于具有 RDMA 的机器,远程开销为 0,需要良好的软件支持才能利用这一点。
GASNet 提供 put/get 通信,是在网络硬件之上的一层。
- 一方面:API 中不需要远程 CPU 参与(与 MPI 的主要区别)
- 消息包含远程地址
- 无需与接收匹配
- 无需隐式排序
下图是GASNet和MPI在通信上的差异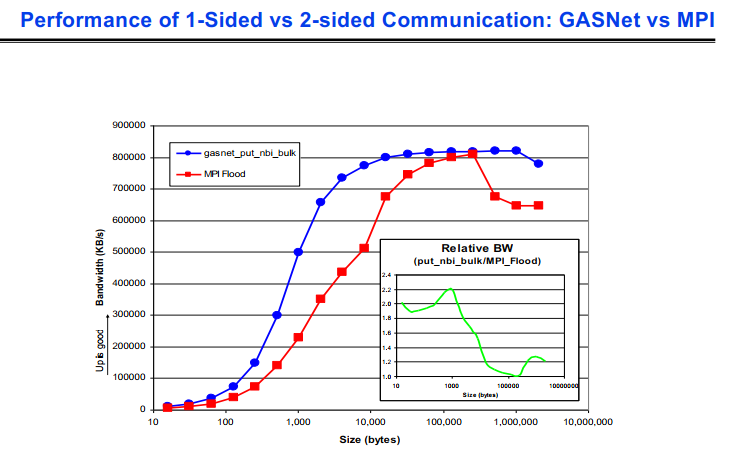
lecture 20
PRAM模型:
- 理想化的并行共享内存系统模型
- 无限数量的同步处理器; 无同步、通信成本; 没有并行开销
- EREW(独占读独写)、CREW(并发读独占写)
- 衡量性能:空间和时间复杂度; 操作总数(工作)
- 优点
- 简单而干净的语义。
- 大多数理论并行算法是使用 PRAM 模型设计的。
- 独立于通信网络拓扑。
- 缺点
- 不现实,太强大的通信模型。
- 通信成本被忽略。
- 需要同步处理器。
- 没有本地内存。
- 大 O 符号通常具有误导性。
图的表示:压缩稀疏行:缓存高效的邻接表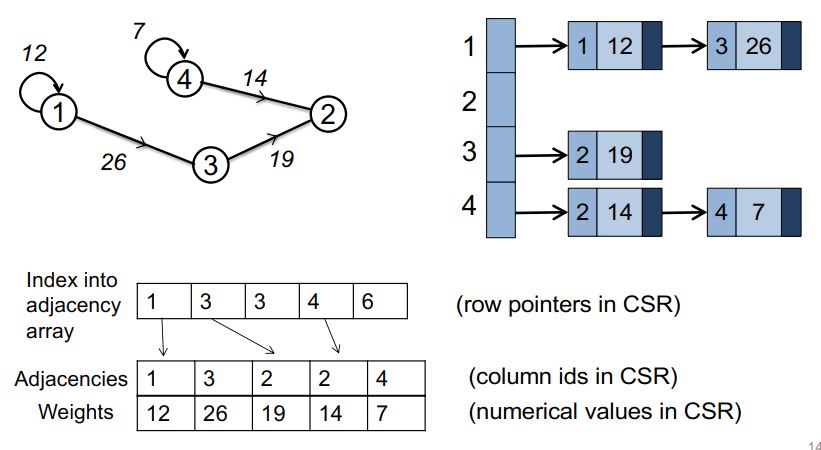
分布式网格表示:
- 每个处理器存储整个图(“完全复制”)
- 每个处理器存储 n/p 个顶点以及这些顶点之外的所有邻接(“一维分区”)
- 如何创建这些“p”顶点分区?
- 图分区算法:递归优化电导(边缘切割/较小分区的大小)
- 随机打乱顶点标识符确保边数/处理器大致相同
二维棋盘表示:
- 考虑一个逻辑 2D 处理器网格 (pr * pc = p) 和图的矩阵表示
- 为每个处理器分配一个子矩阵(即子矩阵内的边)
应该是把图的矩阵表示进行分割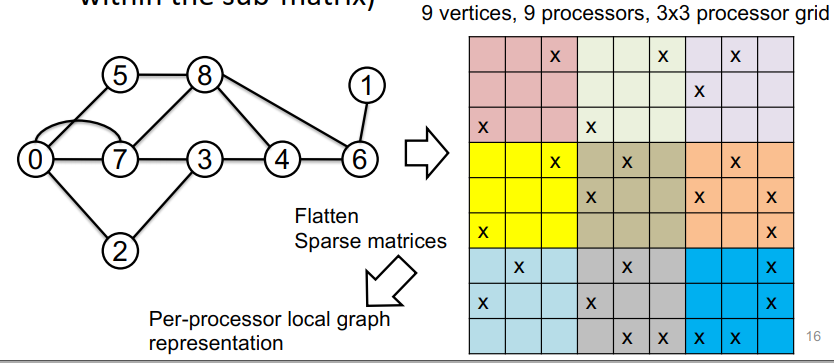
DFS:并行化DFS的复杂度很高,难以并行
1 | procedure DFS(vertex v) |
BFS的内存要求:
- 稀疏图表示:m+n
- 访问顶点堆栈:n
- 距离阵列:n
广度优先搜索是其他并行图算法的一个非常重要的构建块,例如(二部)匹配、最大流、(强)连接分量等。
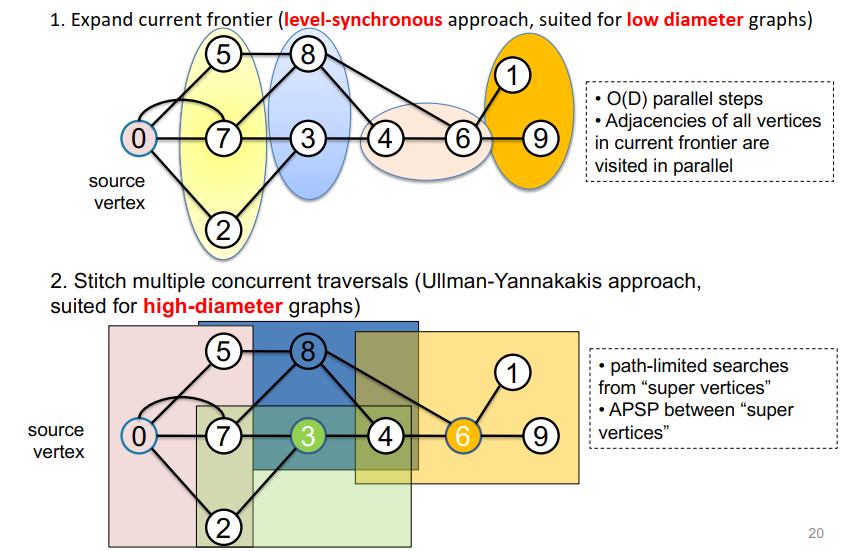
并行化BFS:
- 扩展当前边界(水平同步方法,适用于小直径图)
- 并行访问当前边界中所有顶点的邻接
- 拼接多个并发遍历(Ullman-Yannakakis方法,适用于大直径图)
图的矩阵表示A转置为AT。最开始把开始的1点放到parents中,1点的parents是0点。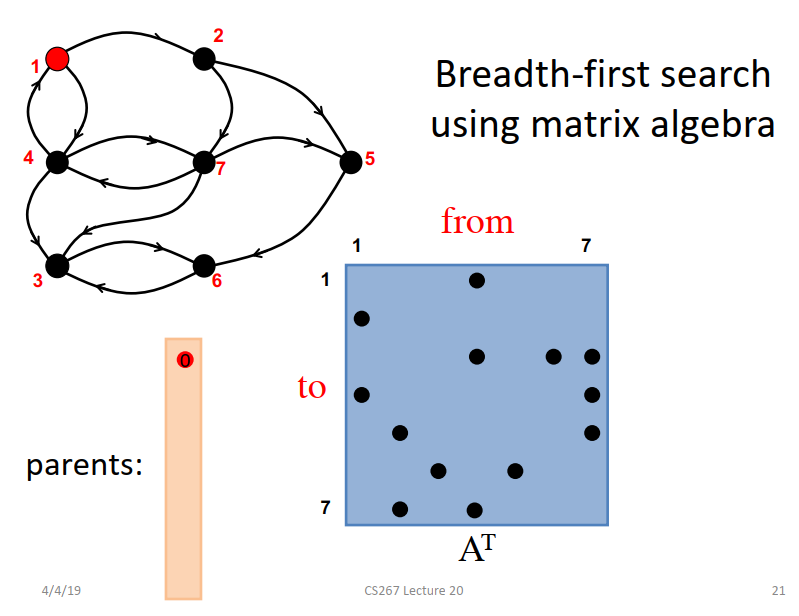
AT乘parents向量得到ATX,得到1的邻接点是2和4,修改parents向量。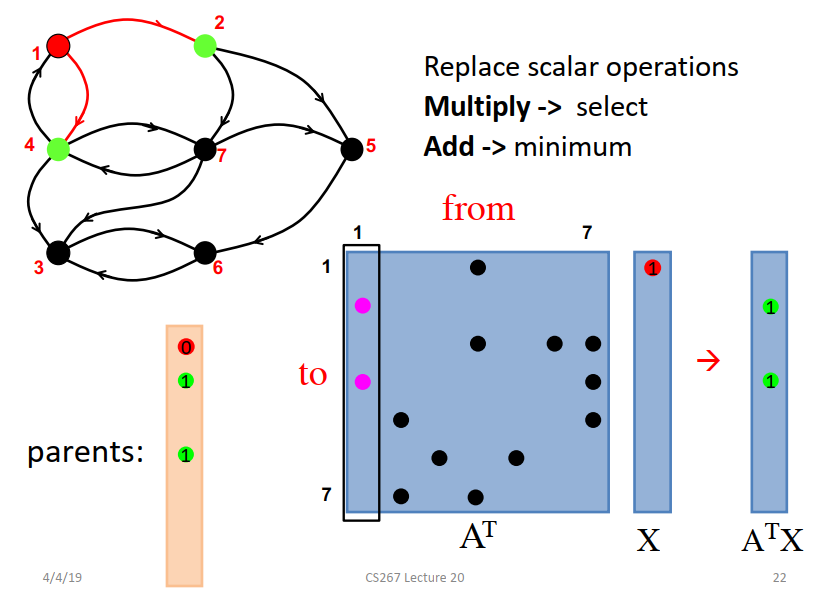
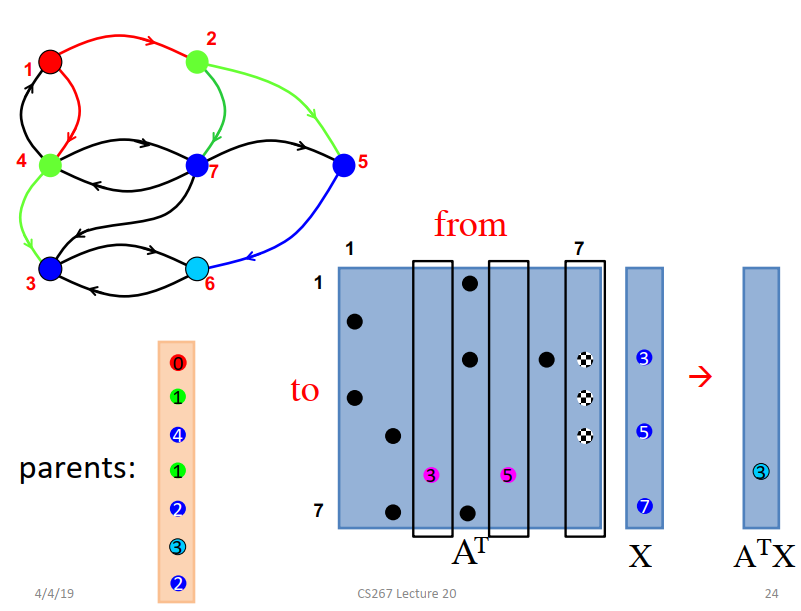
X是上一步求出来的ATX,AT*X得到这一步的邻接点,加入到parent向量中。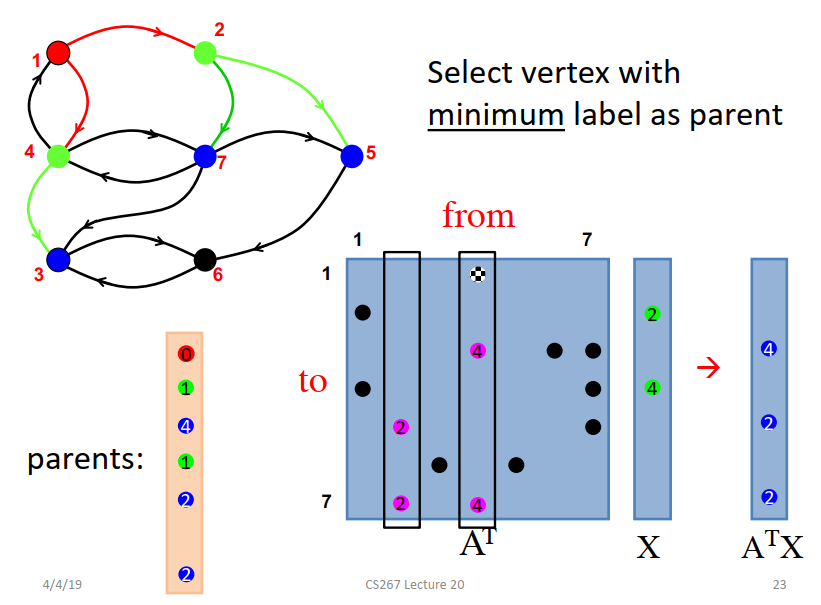
1D Parallel BFS algorithm
- 查找当前边界邻接的所有者。(计算)
- 通过all to all交换邻接。(通讯)
- 更新未访问顶点的distance/parents。(计算)
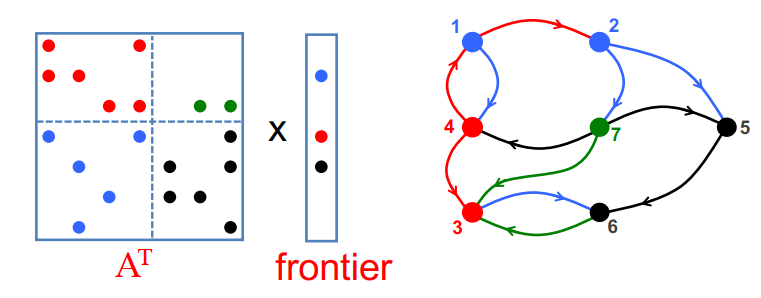
2D Parallel BFS algorithm
- 在处理器列中收集顶点(通信)
- 查找当前边界邻接的所有者(计算)
- 交换处理器行中的邻接(通信)
- 更新未访问顶点的distance/parents。(计算)
并行单源最短路径(Parallel Single-source Shortest Paths,SSSP)算法
- 著名的串行算法:
- Bellman-Ford:标签校正-适用于任何图形
- Dijkstra:标签设置–需要非负边权重
- 没有已知的PRAM算法在次线性时间和O(m+nlogn)下运行
- Ullman Yannakakis随机方法
- meyer and Sanders,∆ - stepping算法
- Chakaravarthy等人,巧妙地结合了∆-stepping和超级计算机规模图上的方向优化(BFS)。
U. Meyer and P.Sanders, ∆ - stepping: a parallelizable shortest path algorithm. Journal of Algorithms 49 (2003)
V. T. Chakaravarthy, F. Checconi, F. Petrini, Y. Sabharwal “Scalable Single Source Shortest Path Algorithms for Massively Parallel Systems ”, IPDPS’14
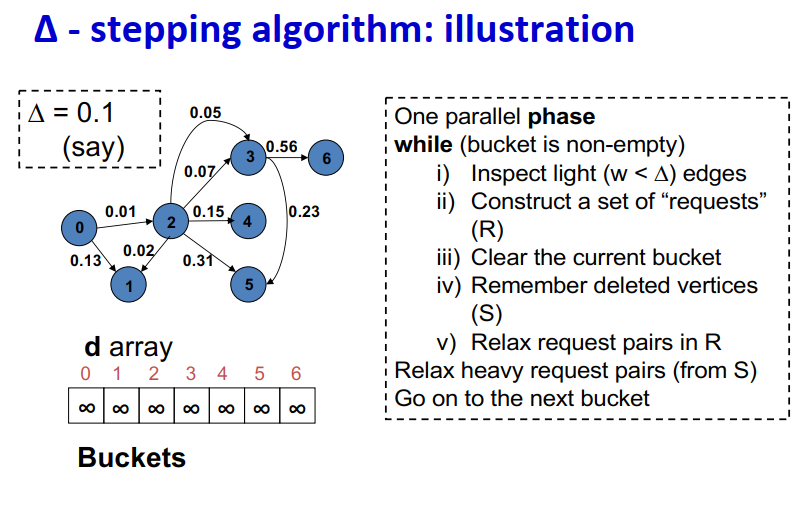
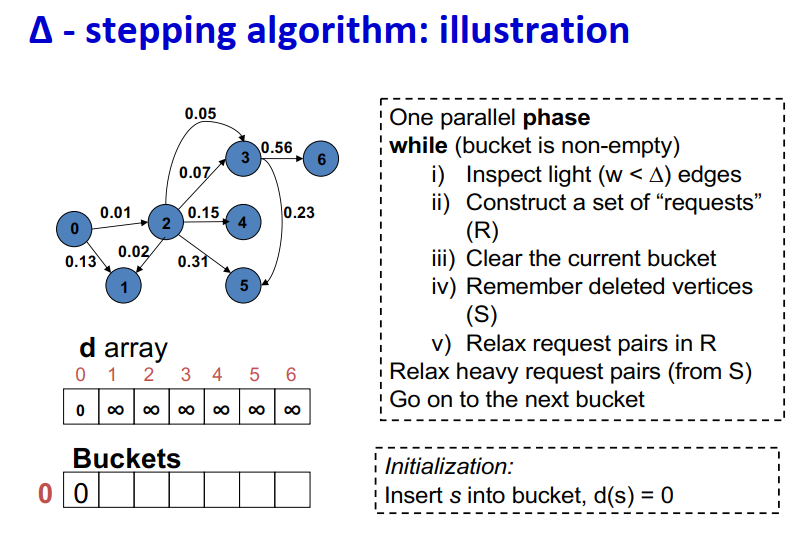
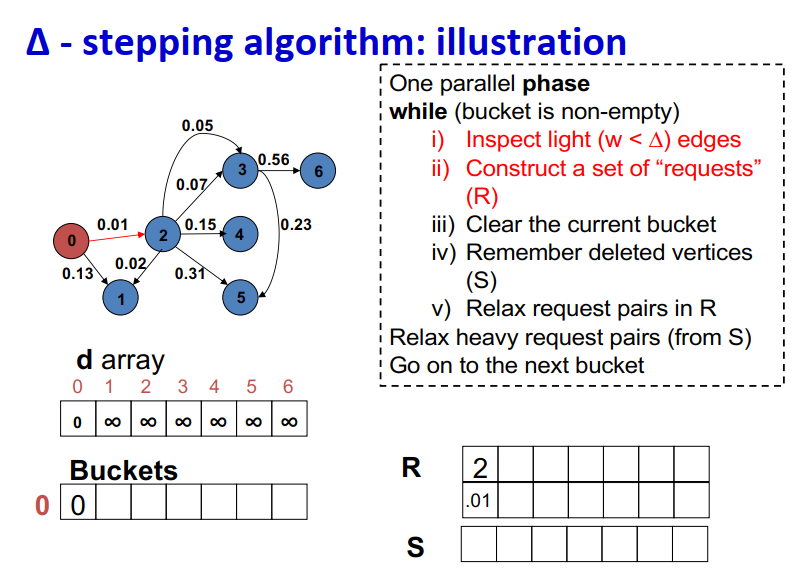
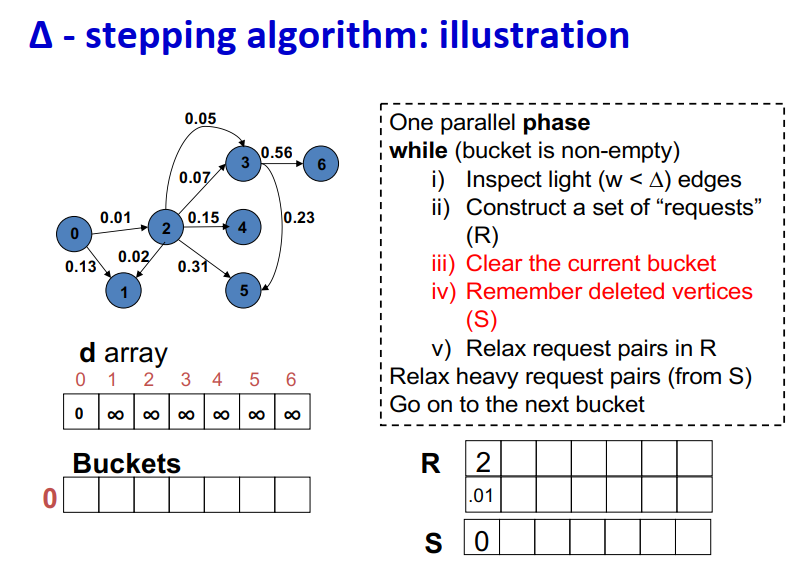
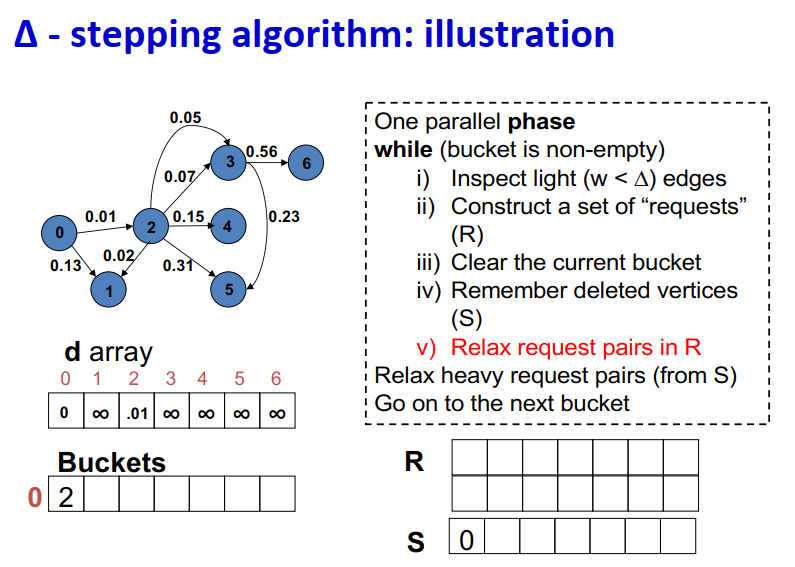
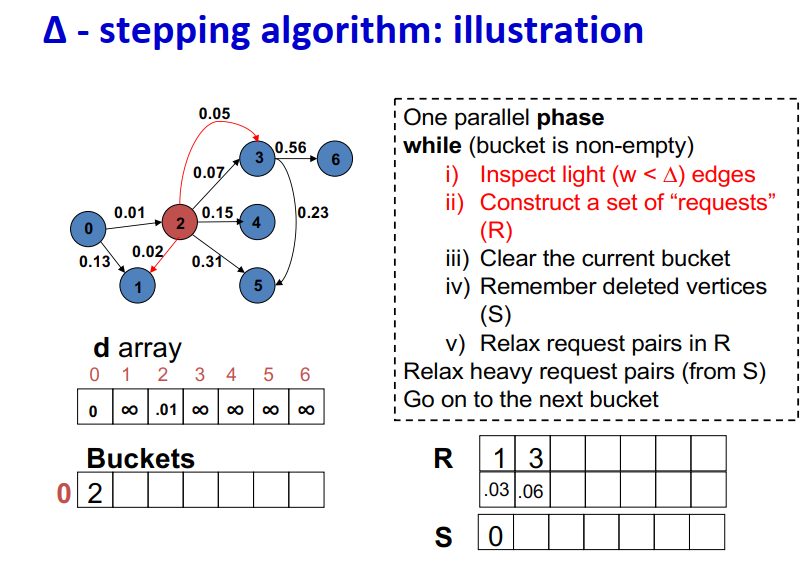
∆ - stepping算法
标签校正算法:可以从未设置的顶点松弛边
“Dijkstra的近似实现”
对于随机边权重[0,1],在L=从源到任何节点的最大距离处运行,复杂度O(n + m + D·L)
顶点使用宽度∆的桶进行排序
每个桶可以并行处理
基本操作:Relax(e(u, v))
- d(v)=min{d(v),d(u)+w(u,v)}
∆ < min w(e):退化为Dijkstra
∆ > max w(e):退化为Bellman-Ford
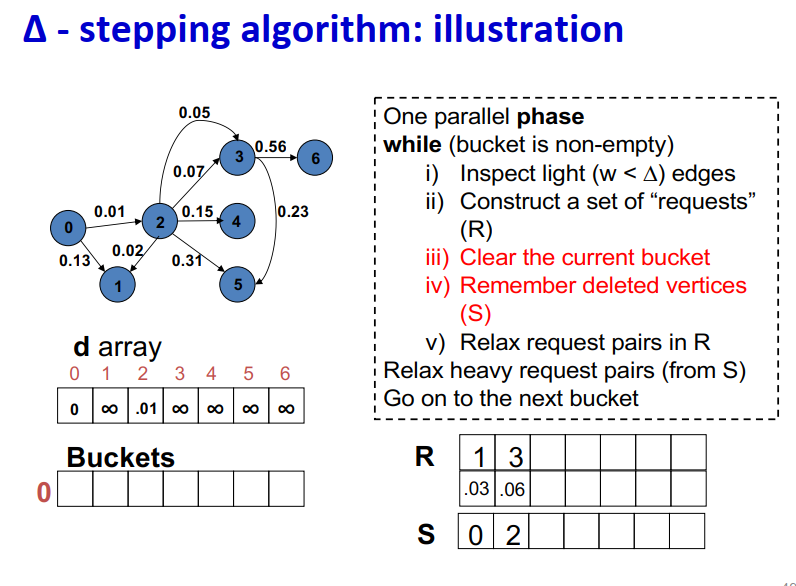
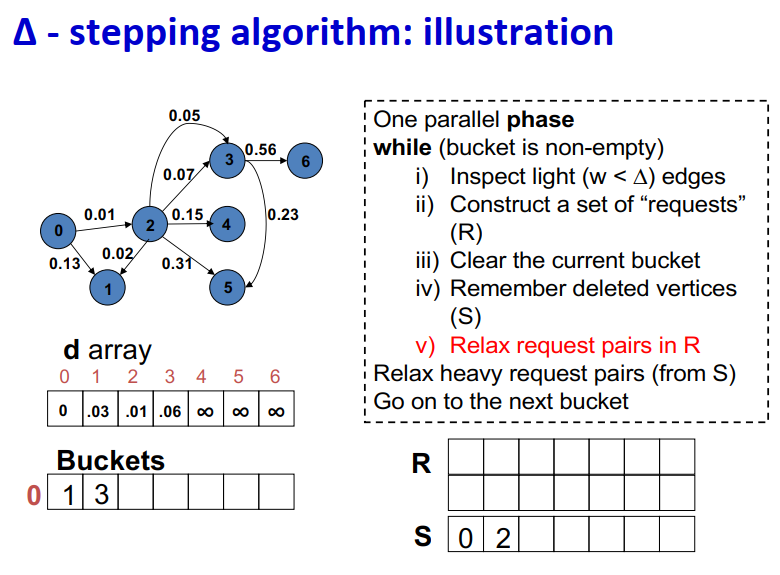
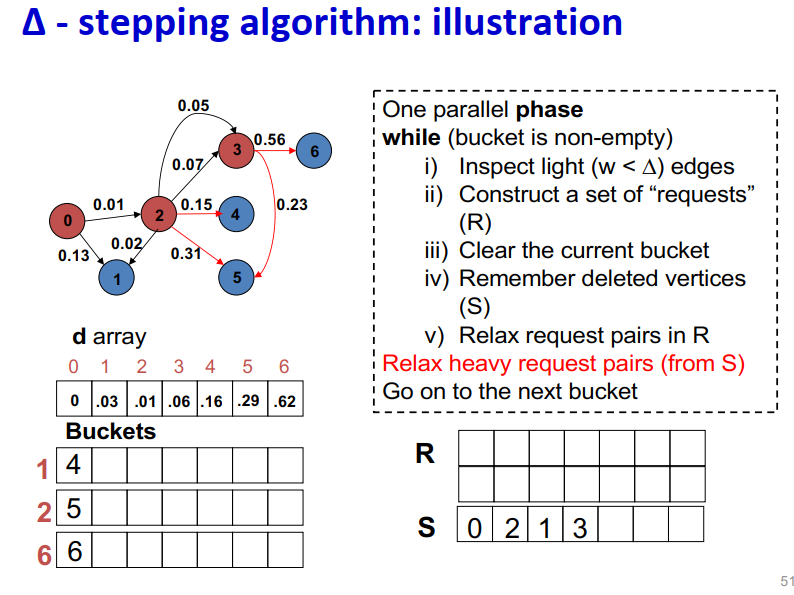
算法说明:
1 | One parallel phase |
Initialization:
- Insert s into bucket, d(s) = 0
最大独立集
- 顶点V={1,2,…,n}的图
- 如果S中没有两个顶点是相邻的,则S组顶点是independent的。
- 如果无法添加另一个顶点并保持独立,则独立集S是maximal的
- 如果没有其他独立集具有更多顶点,则独立集Smaximum
- 难以找到最大独立集(NP难)
- 至少在一个处理器上,找到最大独立集很容易。
红色顶点集S={4,5}是独立的,是maximal的,但不是maximum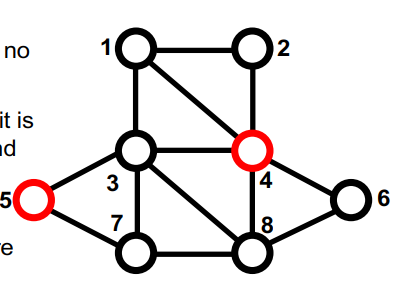
串行的最大独立集算法:
1 | S = empty set; |
并行随机的最大独立集算法
1 | S = empty set; C = V; |
M. Luby. “A Simple Parallel Algorithm for the Maximal Independent Set Problem”
Strongly connected components(SCC)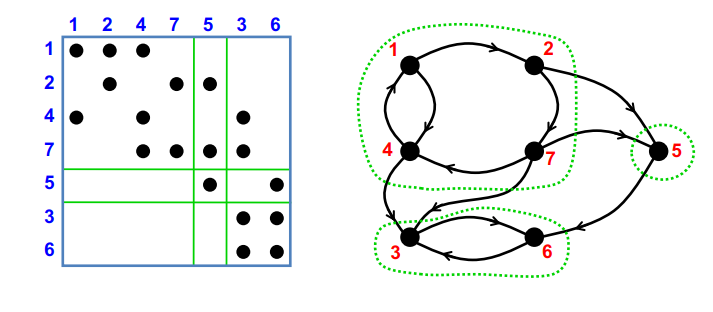
块三角形式的对称置换,通过深度优先搜索在线性时间内找到P。
线性方法:使用DFS,DFS似乎具有内在的顺序性。并行:分而治之和BFS(Fleischer et al.),最坏情况O(n),但实际情况良好。
- 把给定的图分成三个邻接的图,每一个可以递归独立处理。
- 使用并行BFS
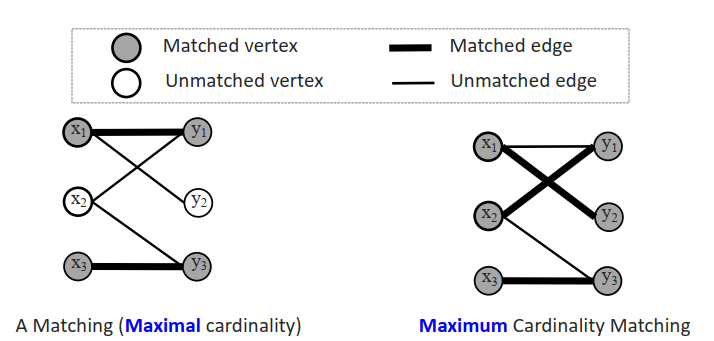
二分图匹配:
- 匹配:没有公共端点的边的子集M。
- | M |=匹配M的基数
最大基数匹配的单源算法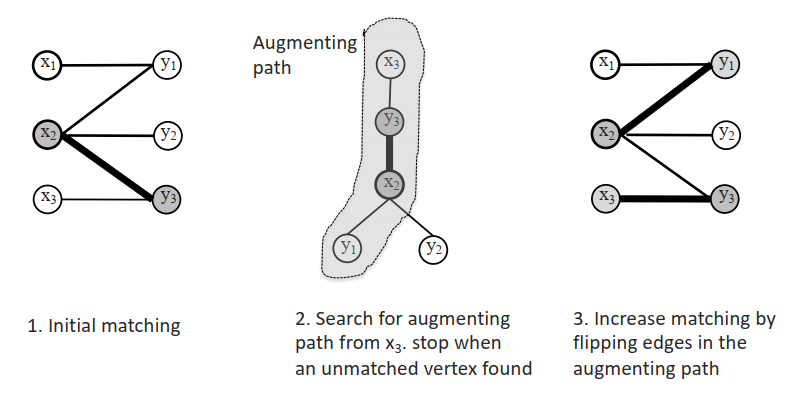
最大基数匹配的多源算法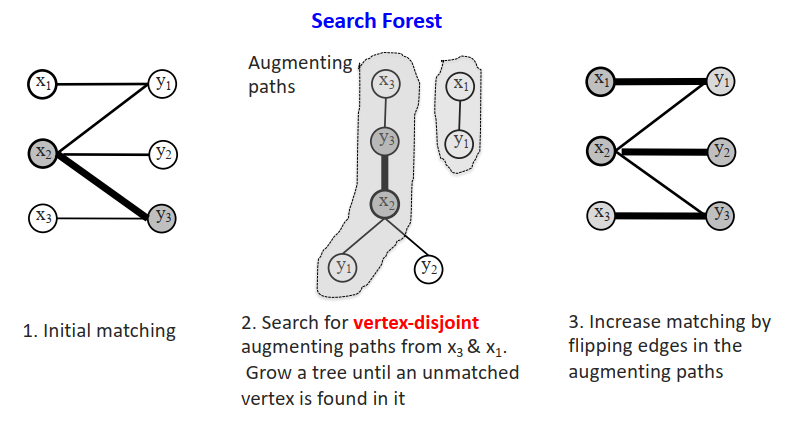
lecture 21
大爆炸宇宙学什么的,没用
lecture 22
云计算和大数据处理
数据编程模型:“数据”并行模型(松散耦合)
- 限制编程接口
- 自动处理故障、位置等。
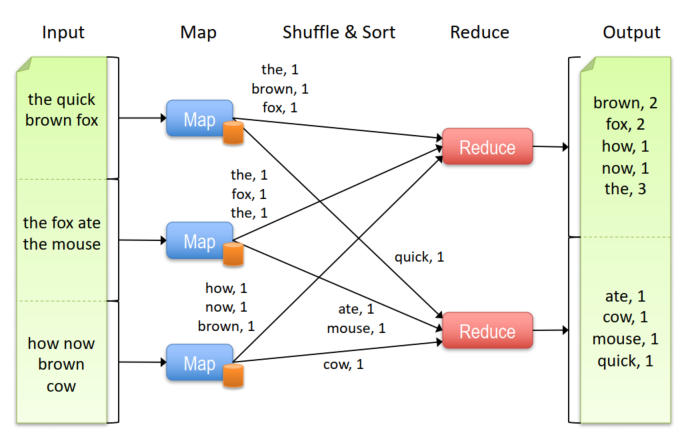
Map-Reduce就是基于这样的模型,每个数据类型都是(key, value)键值对,输入被分到一些节点上,然后结果被reduce到一些节点上
- Map:(Kin, Vin) ➡ list(Kinter, Vinter)
- Reduce:(Kinter, list(Vinter)) ➡ list(Kout, Vout)
如果一个节点上的作业挂了?
- 在其他节点上重试这个作业
- 如果这个作业还是挂掉,结束这个作业
如果节点挂了?在其他节点上重新启动现在的任务
相比于MPI是并行模型,更加细粒度,MapReduce是更高级别的数据级并行,自动进行数据传递。
如果是多步的任务,需要更多的mapper和reducer,比如有21个MR steps的话,就要有21个mapper和21个reducer。因此提出了spark。
spark提供了更简单的API,比MR少5-10倍的代码,内存计算速度更快,也有算子之间的优化。
lecture 23
为什么会有很垃圾的扩展性?
- 通信开销大
- 同步开销大
- 很多进程空闲着(负载不平衡、缺乏并行性等)
如何测试负载不平衡?
- 很难将负载不平衡与高同步开销分开
- 基本测量:barrier周围的计时器
- 程序缺乏并行性是固有的负载不平衡——无法通过更好的负载平衡来解决
- 不要性能数据的平均!需要查看所有值或画出直方图
- 特别微妙,如果不是批量同步的话
- 自旋锁可以使同步看起来像是有用的工作
- 不平衡可能由硬件(缓存、动态时钟等)引起
矩阵向量乘:很简单的是稠密乘;比较难的稀疏乘,每一行都有不同的开销,如果提前知道稀疏矩阵的布局,将行按照相同的非零元数分割更好。
任务开销可变性(来自应用程序)
- 简单:开销相等,数量固定:规则网格、密集矩阵、直接 n 体
- 困难:任务有不同但可估计的时间,固定数量:自适应和非结构化网格、稀疏矩阵、基于树的 n 体、粒子网格方法
- 最难:直到执行中期才知道时间或计数:搜索(UTS)、不规则边界、子网格物理、不可预测的机器
请注意,良好的负载平衡无法解决并行性不足的问题。
作业之间的依赖关系:
- 简单:一组准备好的任务
- 矩阵乘法,域分解(空间循环)
- 中:任务有已知关系(任务图)
- chain:随着时间的推移循环; 迭代方法(外循环)
- tree:分而治之的算法
- graph:直接求解器(密集和稀疏),即 LU、Cholesky…
- 困难:直到运行时才知道任务结构
- tree:搜索
- graph:离散事件
DFS vs BFS
- 带有显式堆栈的 DFS——几乎没有并行性
- 将根节点放入栈
- 当栈不为空
- 将栈顶元素弹出
- 如果找到了目标就返回
- 否则将子节点放入栈中
- 带有显式堆栈的BFS——并行性强
- 将根放入队列(FIFO)
- 当队列不为空时
- 移除队列前端
- 如果找到目标?返回成功
- 否则将子节点排入队列末尾
- 将根放入队列(FIFO)
分布式任务队列
- 任务队列对分布式内存的明显扩展是:
- 分布式任务队列(或包),即每个处理器一个
- 空闲处理器可以拉动工作,或者忙碌的处理器推工作
- 什么时候“分布式”队列是个好主意?
- 分布式内存多处理器
- 通常在共享内存上以避免同步争用
- 任务之间的位置不是(非常)重要
- 事先不知道任务和/或数量的开销
- 术语旁注:
- 队列:先进先出 (FIFO)
- 堆栈:后进先出 (LIFO)
- 包:任意出局
如何选择发送/接收处理器
- 基本技术:
- 独立循环(常见bug:都开始看p0)
- 每个处理器k,保持一个变量targetk
- 当处理器用完工作时,从 targetk 请求工作
- 设置 targetk = (targetk +1) mod procs
- 全局循环
- Proc 0 保持单个可变target变量
- 当处理器需要工作时,获取target,从target请求工作
- Proc 0 设置目标 = (target + 1) mod procs
- 随机获取
- 当处理器需要工作时,随机选择一个处理器并向它请求工作
- 随机推送
- 当处理器有太多工作(至少两个任务)时,推送任务到随机处理器
- 独立循环(常见bug:都开始看p0)
- 终止检测非常重要
随机负载均衡
- 想要避免共享队列的瓶颈
- 特别是在分布式内存中(但即使在共享内存中)
- 所以自调度、Chunked SS、GSS 都不好
- 使用分布式队列进行共享
- 如何选择处理器?
- 异步或全局循环
- 随机推送:快速平衡,可能会失去空间局部性
- 随机拉取:缓慢平衡,尽可能保留局部性
Cilk:内建负载均衡的语言
基于扩散的负载均衡
- 在随机化方案中,机器被处理为全连接。 [Cybenko,1989]
- 基于扩散的负载平衡将拓扑考虑在内
- 向附近的几个处理器发送一些额外的工作
- 与附近邻居的平均工作量
- 与扩散的类比(Jacobi 用于求解泊松方程)
- 局部性优于选择随机处理器
- 负载平衡比随机化慢
- 在创建时必须知道任务的开销
- 任务之间没有依赖关系
- 向附近的几个处理器发送一些额外的工作
- 参见 Ghosh et al,SPAA96 了解二阶扩散负载平衡算法
- 考虑上次发送的工作量
- 避免一阶方案的一些振荡
DAG调度软件
- DAGuE
- 开发库以支持(最初)稠密线性代数
- SMPss
- 基于编译器; 通过编译指示表达的数据使用; 提议在 OpenMP 中; 最近添加的 GPU 支持
- StarPU (INRIA)
- 基于库; GPU支持; 分布式数据管理; Codelets=tasks(映射 CPU、GPU 版本)
- OpenMP4.0 / GCC 4.9
- 参见 openmp.org
- 其他工具(例如,仅限 fork-join 图)
- Cilk、英特尔线程构建块 (TBB)、Microsoft CCR、SuperGlue 和 DuctTEiP
任务通信
- 静态:常规(或无)
- 网格上的最近邻、密集矩阵、规则网格、FFT、直接 n 体(all-to-all)集合(难以扩展;易于调度)
- 半静态:可以预先计算通信模式
- 可以预先安排发送/接收对
- 稀疏直接线性代数求解器,例如 LU、Cholesky、AMR、树结构 n 体
- 动态:随机访问 - 模式事先未知且不会重复
- 搜索、离散事件、稀疏更新、直方图、哈希表
解决方案的范围:一个关键问题是何时知道有关负载平衡问题的某些信息。
- 静态调度。 所有信息都可用于调度算法,该算法在任何实际计算开始之前运行。
- 离线算法,例如图分区、DAG 调度
- 如果信息太多,仍可能使用动态方法
- 半静态调度。 信息可能在程序启动时、每个时间步的开始或其他明确定义的点上是已知的。 即使问题是动态的,也可以使用离线算法。
- 例如 Kernighan-Lin,如 Zoltan
- 动态调度。 直到执行中期才知道信息。
- 在线算法——今天的主要话题
动态负载均衡
负载均衡因任务属性而异
- 任务成本
- 所有任务的成本是否相等?
- 如果没有,成本什么时候知道?
- 开始前、任务创建时或仅任务结束时
- 任务依赖
- 所有任务能否以任何顺序运行(包括并行)?
- 如果没有,何时知道相关性?
- 开始前、任务创建时或仅任务结束时
- 一项任务可能会提前结束另一项任务(例如搜索)
- 位置(可能会与负载平衡进行权衡)
- 将某些任务安排在同一处理器(或附近)是否重要?以降低通信成本?
- 什么时候知道有关通信的信息?
- 如果仅在任务结束时才知道属性
- 统计数据是固定的、缓慢变化的还是突然变化的?
混合并行:作为另一种变体,考虑具有 2 个并行性级别的问题
- 粗粒度的任务并行性
- 任务多时好,任务少时差
- 细粒度的数据并行性
- 任务中的并行度高时好,少时差
- 出现在:
- 自适应网格细化
- 离散事件模拟,例如电路模拟
- 数据库查询处理
- 稀疏矩阵直接求解器
- 我们如何很好地调度这两种并行?
lecture 24
四叉树
- 细分平面的数据结构
- 节点可以包含框中心坐标、边长
- 最后还有 CM、总质量等的坐标。
- 在完整的四叉树中,每个非叶节点有 4 个孩子
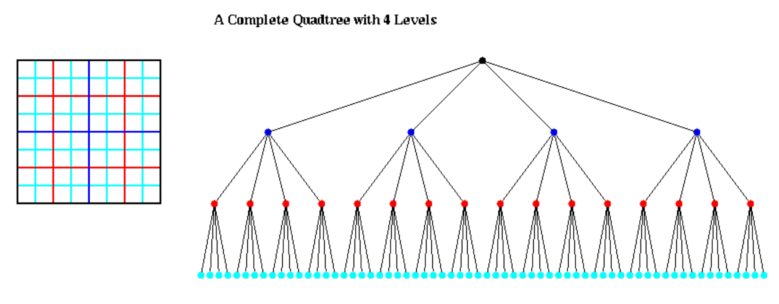
使用四叉树和八叉树
- 我们所有的算法都从构建一棵树来容纳所有粒子开始
- 在完整的树中,大多数节点都是空的,浪费空间和时间
- Adaptive Quad (Oct) Tree 仅细分粒子所在的空间
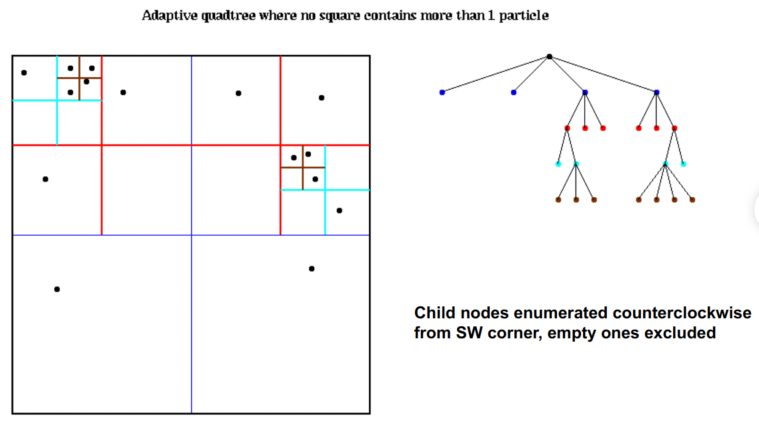
自适应四叉树的开销:
- Cost ≤ N * maximum cost of Quad_Tree_Insert
- = O( N * maximum depth of Quad_Tree)
- 粒子分布平均
- Depth of Quad_Tree = O( log N )
- Cost ≤ O( N * log N )
- 粒子分布随机
- Depth of Quad_Tree = O( # bits in particle coords ) = O( b )
- Cost ≤ O( b N )
Barnes-Hut Algorithm
N-Body 问题的 O(N log N) 近似算法
使用 QuadTreeBuild 构建四叉树
- 已经描述过,成本 = O( N log N) 或 O(b N)
对于 QuadTree 中的每个节点,计算其包含的所有粒子的 CM 和总质量 (TM)
- 四叉树的后序遍历,成本 = O(N log N) 或 O(b N)
对于每个粒子,遍历四叉树来计算它所受的力,使用距离子平方的CM和TM
- 算法核心
- 开销取决于所需的准确度,但仍为 O(N log N) 或 O(bN)
Step 3 of BH: 计算每个粒子上的力
- 对于每个节点,可以通过使用节点CM和TM来近似由于节点内部的粒子而对节点外部的粒子施加的力
- 如果节点离粒子足够远,这将足够准确
- 对于每个粒子,使用尽可能少的节点来计算力,受精度约束
- 需要判断一个节点是否离粒子足够远的标准
- D = side length of node
- r = distance from particle to CM of node
- q = user supplied error tolerance < 1
- Use CM and TM to approximate force of node on box if D/r < q
Details of Step 3 of BH
- 对于每个粒子,遍历四叉树以计算其上的力
- for k = 1 to N
- f(k) = TreeForce( k, root )
- 计算由根内所有粒子引起的粒子 k 上的力(k 除外)
- function f = TreeForce( k, n )
- 对于节点 n 内的所有粒子(k 除外),计算粒子 k 上的力
- f = 0
- 如果 n 包含一个粒子(不是 k)……直接求值
- f = 使用直接公式计算的力
- 否则
- r = 从粒子 k 到粒子在 n 中的 CM 的距离
- D = size of n
- if D/r < q … 可以通过 CM 和 TM 来近似
- 使用 CM 和 TM 近似计算 f
- else ..需要查看内部节点
- for all children c of n
- f = f + TreeForce ( k, c )
lecture 25
元素选择问题:在N个数据中找到第k小个元素,是一些算法的基础部分。快速选择(Hoare方法)类似快排,但是只在一个方向上递归。平均时间O(N),最坏情况O(N2)。
中位数查找 (Blum, Floyd, Pratt, Rivest, Tarjan):基于quickselect,但保证最坏情况下的线性时间。与并行算法紧密结合。
快速排序的思想,是找出一个中轴(pivot),之后进行左右递归进行排序,关于递归快速排序,C程序算法如下。
1 | void quick_sort(int *arr,int left,int right){ |
关于划分,不同的划分决定快排的效率,下面以lomuto划分和hoare划分来进行讲述思路
lomuto划分思想:lomuto划分主要进行一重循环的遍历,如果比left侧小,则进行交换。然后继续进行寻找中轴。最后交换偏移的数和最左侧数,C程序代码如下。
1 | /**lomuto划分*/ |
hoare划分思想是先从右侧向左进行寻找,再从左向右进行寻找,如果左边比右边大,则左右进行交换。外侧还有一个嵌套循环,循环终止标志是一重遍历,这种寻找的好处就是,在一次遍历后能基本有序,减少递归的时候产生的比较次数。这也是经典快排中所使用的方法
1 | /**hoare划分*/ |
经典快排实际对hoare划分进行了少许改进,这个temp变量不需要每次找到左右不相等就立即交换,而是,暂时存放,先右边向左找,将左边放在右边,再左边向右找,把右边放左边,最后把初始temp变量放在左值。这样比hoare划分减少少许移动变量次数。
1 | /**经典快排*/ |
选择中位数的方法:
- 将整个列表分成最少N/5个子列表,每个子列表最少5个元素;
- 对每个子列表排序并找到中位数
- 对这些子列表中的每个中位数,组织成一个列表M
- 对M继续上述行为。
最好情况下,递归操作找到中位数,各个元素之间的关系如下,A’中的元素都小于中位数,C’中的元素都大于中位数。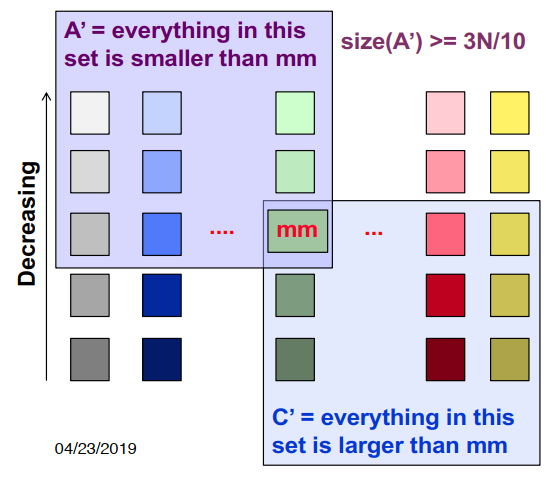
将整个列表划分为三个区域集:A、B、C
- A=小于mm的元素集(A’是A的子集)
- B=等于mm的元素集
- C=大于mm的元素集(C’是C的子集)
1 | SELECT(S, k) // find kth smallest in S |
复杂度:T(n) <= T(n/5) + T(7n/10) + O(n),A不包括C’的成员(C不包括A’的成员)。因为T(n) <= T(9n/10)+O(n),且nlog109 <= O(n),所以T(n) = O(n)。
有没有一种并行的算法实现查找中位数?
- 加权中值的中位数
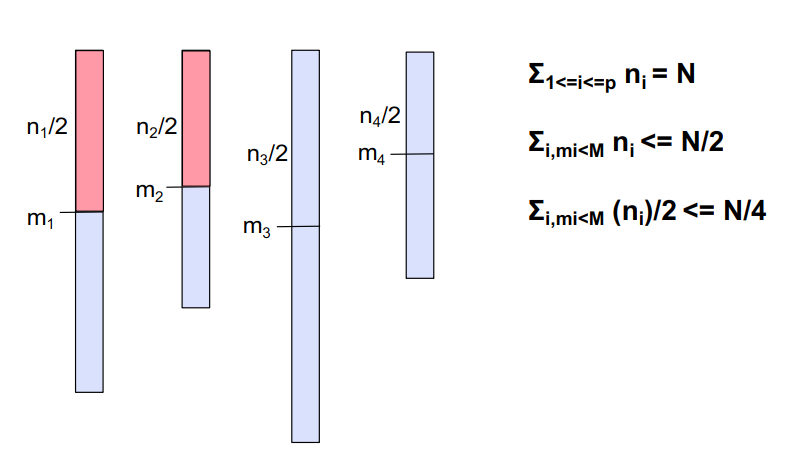
给定p个元素m1, m2 , … , mp 每个元素有正的权重w1 , w2 , … , wp,Σ1<=i<=p wi = 1,加权中值是满足以下条件的元素M,Σi,mi<M wi <= 1/2 and Σi,mi>M wi <= 1/2,就是说找到一个i,使得i前边的元素的权值加起来和i后边的元素的权值加起来都小于等于1/2。
1 | PARALLELSELECT(S, k) // find kth smallest in S |
因为Σi,mi<M wi <= 1/2,Σi,mi>M wi <= 1/2,用每个处理器中的元素数替换权重:Σi,mi<M ni <= N/2,Σi,mi>M ni <= N/2。
在处理器i处,小于等于mi的元素至少为ni/2(根据中值定义)。这些元素中有一半也小于M。
- 因此,小于或等于M的总#元素(在所有处理器中)为N/4
- “大于或等于”的大小写是对称的
合并排序
- Mergesort是递归排序算法的一个示例。
- 它基于分而治之的范式
- 它使用合并操作作为其基本操作(接收两个排序序列并生成单个排序序列)
- mergesort的缺点:不是in-place的(使用额外的临时阵列)
1 | template <typename T> |
1 | template <typename T> |
如果两个数组中要合并的元素总数为n=na+nb,则两个递归合并中较大的一个数组中的元素总数最多为(3/4)n。
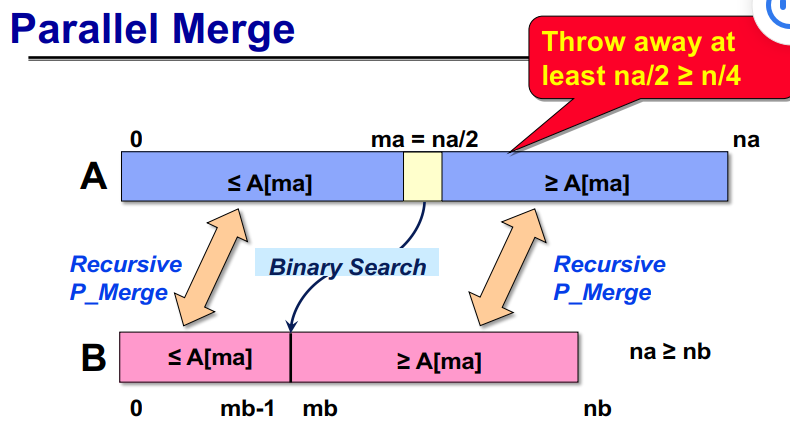
1 | template <typename T> |
在桶排序中,输入数字的范围[a,b]被划分为m个大小相等的间隔,称为桶。
- 每个元素都放置在其相应的桶中。
- 如果数量在范围内均匀划分,则预计bucket的元素数量大致相同。
- 桶中的元素在本地分类。
- 该算法的运行时间为Θ(nlog(n/m))。
并行bucket排序
- 并行桶排序相对简单。我们可以选择m=p。
- 在这种情况下,每个处理器都有其负责的一系列值。
- 每个处理器运行其本地array,并将其每个元素分配给相应的处理器。
- 使用单个all-to-all个性化通信将元素发送到目标处理器。
- 每个处理器对其接收的所有元素进行排序。
- 负载不平衡:假设输入元件均匀分布在间隔[a,b]上是不现实的。
并行采样排序
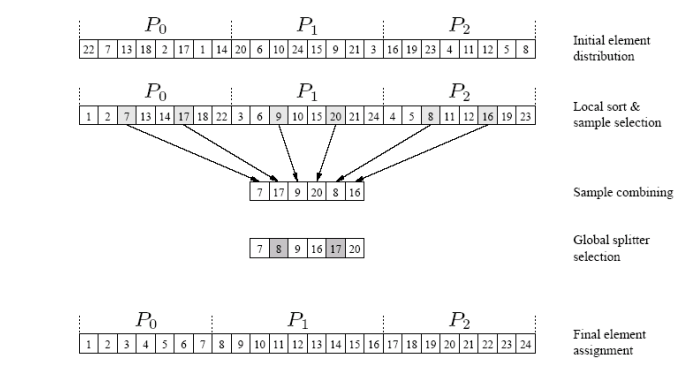
- 快速排序的泛化:从1支点到p支点。这是通过选择合适的拆分来实现的。
- 拆分选择方法将n个元素划分为m个块,每个块的大小为n/m,并使用快速排序对每个块进行排序。
- 从每个排序块中选择m-1个均匀间隔的样本。
- 从所有区块中选择的m(m-1)元素代表用于确定铲斗的样本。
- 该方案保证每个桶中结束的元素数量小于2n/m
并行样本排序:复杂性分析
- n/p元素的内部排序需要时间Θ((n/p)log(n/p)),而p–1样本元素的选择需要时间Θ(p)。
- all-to-all广播的时间为Θ(p^2),对p(p–1)样本元素进行内部排序的时间为Θ(p^2log p),选择p–1等距分离器需要时间Θ(p)。
- 每个进程可以通过在时间Θ(plog(n/p))中执行p-1二进制搜索,将这些p-1拆分器插入其大小为n/p的本地排序块中。
- 元素重排时间为O(n/p)
